运动控制_运动控制器 每次发送几个-程序员宅基地
技术标签: EtherCAT Introduce
T568B百兆以太网接法:
TX+ 橙白
TX- 橙色
RX+ 绿白
RX- 绿色
最近在学习运动控制:
Refer:
https://www.cnblogs.com/21207-iHome/p/7722633.html
1.何为运动控制:
运动控制就是通过机械传动装置对运动部件的位置、速度进行实时的控制管理,使运动部件按照预期的轨迹和运动参数(如速度、加速度参数等)完成相应的动作。
运动控制系统发的典型构成:
开环:系统被控对象由输入端到输出端直接输出。
闭环:系统被控对象的输出(被控制量)反馈到输入端,影响控制器的输出,形成一个或多个闭环。
闭环控制系统有正反馈和负反馈,若反馈信号与系统给定值信号相反,则称为负反馈,若极性相同,则称为正反馈。
举例
开环:CPU风扇!只有供电 速度监视(而不是监控)
闭环:光驱电机控制电路 比例放大电路。。很多 无处不在
正反馈的有振荡电路 如 收音机电视机本振电路 显示器开关电源 等
1.开环系统(电机:步进电机,驱动器:脉冲分配, 电流放大)
2.半闭环系统
3.全闭环系统(驱动器:速度反馈控制,电流放大;运动控制器:运动规划,速度指令,位置反馈取自负载)
全闭环伺服系统可以消除机械传动带来的误差,而半闭环系统只能补偿部分误差,因此,半闭环伺服系统的精度比全闭环伺服系统的精度要低一些。由于采用了位置检测装置,所以全闭环系统的位置精度在其他因素确定了之后,主要取决于检测装置的分辨率和精度。
注意半闭环系统区别。驱动器如果工作在位置模式,运动控制器(运动控制卡、PLC…)就只做位置轨迹的规划(Trajectory generator),每个通信周期发送目标位置到驱动器。驱动器接收到设定位置后,与当前位置比较,并依据控制器-驱动器通信周期与驱动器位置环周期进行线性或者非线性插值,将插值作为每个位置环周期的“设定位置”。
举个例子,假设驱动器位置环周期是125us,控制器和驱动器通信周期为 2ms,当前位置为 0,目标位置为 1mm,那么接下来 16 个周期驱动器位置环的“设定位置”就依次为:0.0625mm,0.125mm, 0.1875mm, 0.25mm,……1mm. 如果没有插值,那么接下来驱动器的第 1 个周期的设定位置就是 1mm,驱动器在第 125us时,位置为 1mm,在 2-16 个周期,设定位置维持不变,相当于电机停止,直到第 2ms,接收到新的“给定位置”。由于间隔仅为 2ms,电机并不会真的停止,而是表现为顿挫感,转动不流畅,不连贯。
驱动器如果工作在速度模式,那么控制器就不仅做位置曲线的规划,还要完成位置环的调节。此时NC周期与位置环周期相等,不必插值。伺服驱动器的位置环被忽略,其速度环直接接受上层给出的“设定速度。
驱动器工作模式:
Refer:ETG.6010
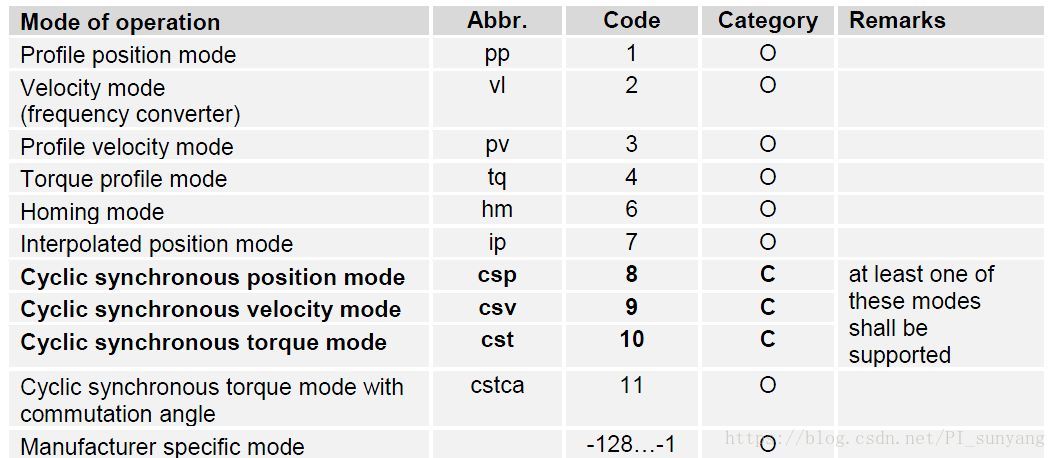
不同厂家支持的模式不相同,但是基本支持CiA402标准。
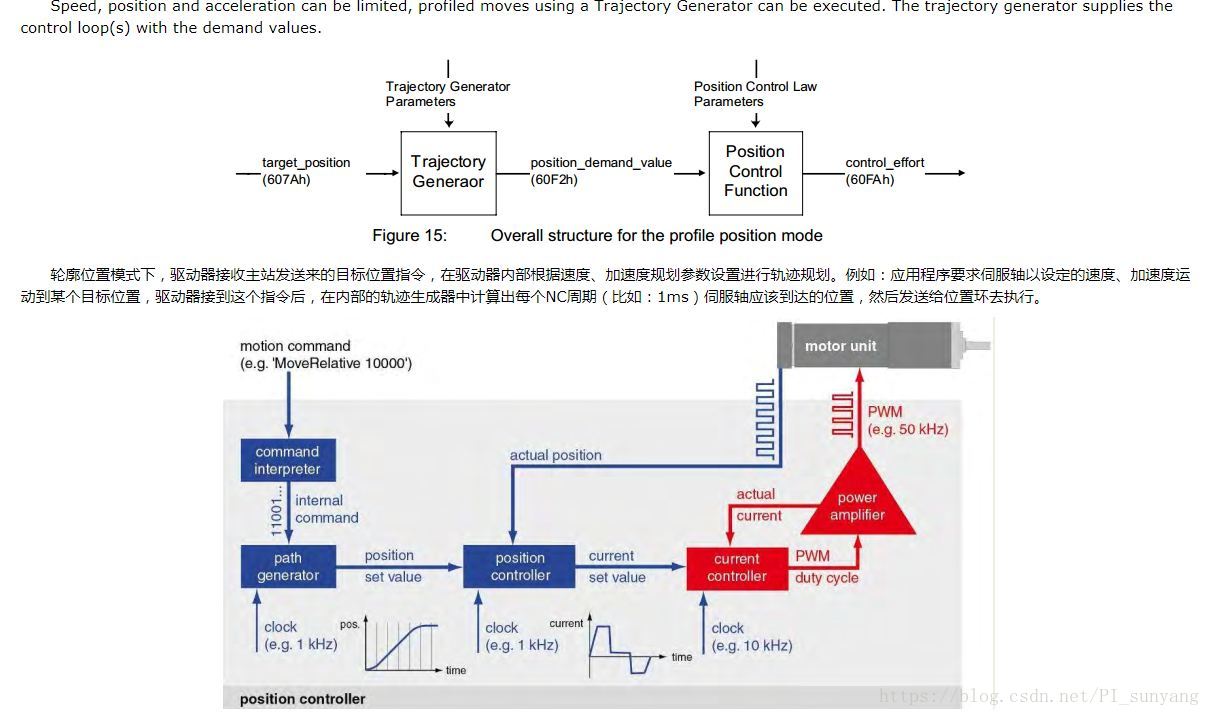
PPM:
轮廓位置模式(Profile Position Mode)
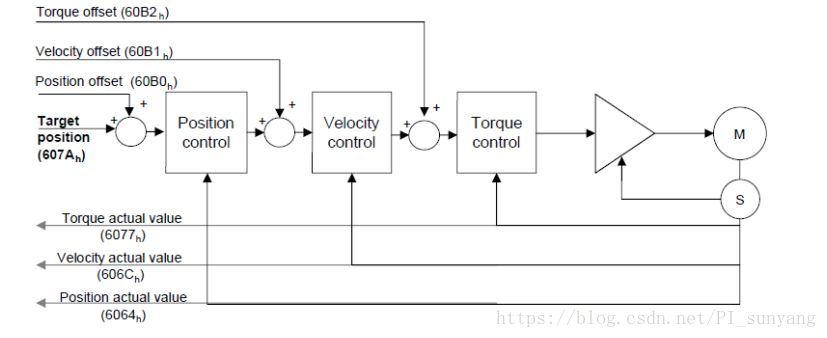
CSP:
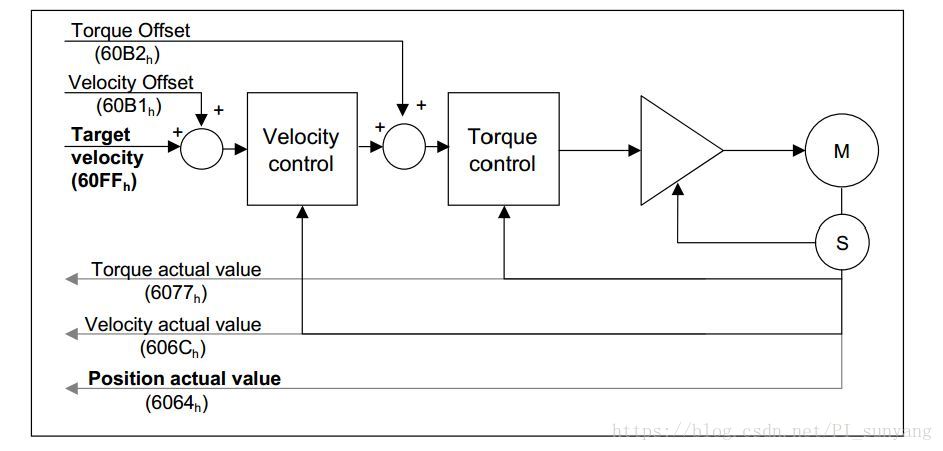
周期同步位置模式(Cyclic synchronous position mode) ,与轮廓位置模式(Profile Position Mode )不同,其轨迹发生器位于控制器端,而非驱动器内。在该模式下,控制器只需要周期性的下发目标位置即可(与位置插补模式的原理相类似),而且可以设置附加的速度前馈(Velocity offset)或转矩前馈(Torque offset):
即轮廓位置模式的Trajectory Generator在驱动器内,周期同步位置模式的Trajectory Generator在控制器内,而位置模式(Position Mode)、电子手轮模式(Master Encoder Mode)、脉冲/方向模式(Step Direction Mode)则不需要轨迹生成器。
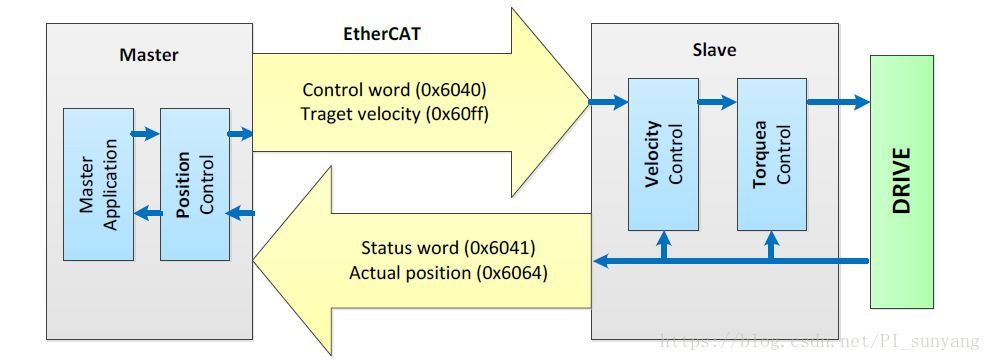
CSV:
原理图:
在周期性同步速度模式CSV 中,一共有四个对象需要添加到对象字典里(其他对象没
必要传回主站),分别为控制字、状态字、目标速度和真实位置,对应的十六进制索引分
别为0x6040、0x6041、0x60FF 和0x6064。其中控制字用来发控制命令给Cia402 状态机,
状态字反馈当前状态机状态,目标速度命令和真实位置反馈则是跑伺服位置环必须的。
PP:
智能推荐
Sandboxie v5.45.2正式版 系统安全工具_sandboxie系统安全工具-程序员宅基地
文章浏览阅读141次。简介:菜鸟高手裸奔工具沙盘Sandboxie是一款国外著名的系统安全工具,它可以让选定程序在安全的隔离环境下运行,只要在此环境中运行的软件,浏览器或注册表信息等都可以完整的进行清空,不留一点痕迹。同时可以防御些带有木马或者病毒的恶意网站,对于经常测试软件或者不放心的软件,可放心在沙盘里面运行!下载地址:http://www.bytepan.com/J7BwpqQdKzR..._sandboxie系统安全工具
Mac技巧|如何在 MacBook上设置一位数登录密码-程序员宅基地
文章浏览阅读230次,点赞4次,收藏5次。Mac老用户都知道之前的老版本系统是可以设置一位数登陆密码的,但是更新到10.14以后就不可以了,今天就教大家怎么在新版本下设置Mac一位数登陆密码。
chatgpt中的强化学习 PPO_chatgpt使用的强化学习-程序员宅基地
文章浏览阅读3.4k次。本该到此结束,但是上述实现的时候其实是把生成的每一步的奖励都使用统一的句子级reward,但该代码其实也额外按照每个token来计算奖励值的,为了获取每个token的奖励,我们在生成模型的隐层表示上,多加一个线性层,映射到一维,作为每个状态的预测奖励值。类似的,在文本生成中我们也可以用蒙特卡洛方法来估计一个模型的状态价值。假如我们只采样到了s1和s2,没有采样到s3,由于7和3都是正向奖励,s1和s2的训练后生成的概率都会变大,且s1的概率变的更大,这看似合理,但是s3是未参与训练的,它的概率反而减小了。_chatgpt使用的强化学习
获取不规则多边形中心点_truf计算重心-程序员宅基地
文章浏览阅读433次,点赞10次,收藏8次。尝试了3种方法,都失败了!_truf计算重心
HDU 1950最长上升子序列 学习nlogn_poj 1631 hdu 1950为啥是最长上升子序列-程序员宅基地
文章浏览阅读406次。学习LIS_poj 1631 hdu 1950为啥是最长上升子序列
kubernetes===》二进制安装_sed -ie 's#image.*#image: ${ epic_image_fullname }-程序员宅基地
文章浏览阅读550次。一、节点规划主机名称IP域名解析k8s-m-01192.168.12.51m1k8s-m-02192.168.12.52m2k8s-m-03192.168.12.53m3k8s-n-01192.168.12.54n1k8s-n-02192.168.12.55n2k8s-m-vip192.168.12.56vip二、插件规划#1.master节点规划kube-apiserverkube-controller-manage_sed -ie 's#image.*#image: ${ epic_image_fullname }#g
随便推点
UAC绕过提权_uac白名单 提权-程序员宅基地
文章浏览阅读106次。UAC绕过提权_uac白名单 提权
Linux一键部署OpenVPN脚本-程序员宅基地
文章浏览阅读664次,点赞7次,收藏12次。每次架设OpenVPN Server就很痛苦,步骤太多,会出错的地方也多,基本很少一次性成功的。
头文件的相互包含问题_多个头文件相互包含-程序员宅基地
文章浏览阅读397次。 今天看了继承以及派生类,并且运行了教程中的一个实例,但是仍然有好多坑。主要如下:建立了一个基类bClass以及由基类bClass派生的一个dClass,并且建立两个头文件.h分别申明这两个类,在cpp程序中进行运行来检验。具体程序如下:#ifndef ITEM_BASE//为避免类重复定义,需要在头文件的开头和结尾加上如这个所示 #define ITEM_BASEclass bClass..._多个头文件相互包含
python -- PyQt5(designer)安装详细教程-程序员宅基地
文章浏览阅读1.3w次,点赞19次,收藏88次。PyQt5安装详细教程,安装步骤很详细
微信小程序scroll-view去除滚动条-程序员宅基地
文章浏览阅读154次。官方文档:https://developers.weixin.qq.com/miniprogram/dev/component/scroll-view.html。_scroll-view去除滚动条
POJ-3233 Matrix Power Series 矩阵A^1+A^2+A^3...求和转化-程序员宅基地
文章浏览阅读146次。S(k)=A^1+A^2...+A^k.保利求解就超时了,我们考虑一下当k为偶数的情况,A^1+A^2+A^3+A^4...+A^k,取其中前一半A^1+A^2...A^k/2,后一半提取公共矩阵A^k/2后可以发现也是前一半A^1+A^2...A^k/2。因此我们可以考虑只算其中一半,然后A^k/2用矩阵快速幂处理。对于k为奇数,只要转化为k-1+A^k即可。n为矩阵数量,m为矩阵..._a^1 a^2 ... a^k