深度学习目标检测:YOLOv5实现车辆检测(含车辆检测数据集+训练代码)-程序员宅基地
技术标签: 车辆目标检测 机动车检测 深度学习 智能驾驶 车辆检测数据集 YOLOv5车辆检测 车辆检测
深度学习目标检测:YOLOv5实现车辆检测(含车辆检测数据集+训练代码)
目录
深度学习目标检测:YOLOv5实现车辆检测(含车辆检测数据集+训练代码)
1. 前言
本篇博客,我们将手把手教你搭建一个基于YOLOv5的车辆目标检测项目。目前,基于YOLOv5s的车辆平均精度平均值mAP_0.5=0.57192,mAP_0.5:0.95=0.41403,基本满足业务的性能需求。另外,为了能部署在手机Android平台上,本人对YOLOv5s进行了模型轻量化,开发了一个轻量级的版本yolov5s05_416和yolov5s05_320,在普通Android手机上可以达到实时的检测和识别效果,CPU(4线程)约30ms左右,GPU约25ms左右 ,基本满足业务的性能需求。
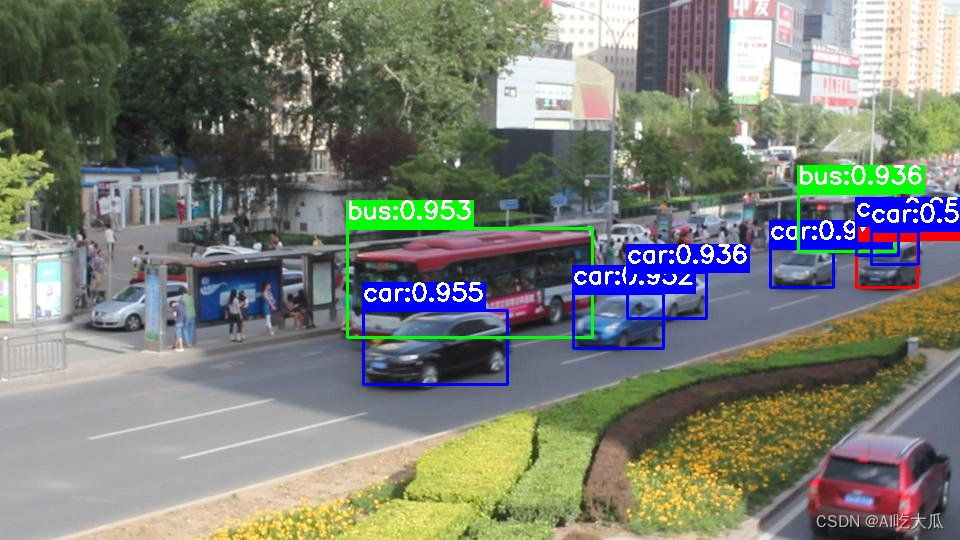
先展示一下Python版本车辆检测Demo效果:
 |
 |
【尊重原创,转载请注明出处】https://panjinquan.blog.csdn.net/article/details/128099672
更多项目《智能驾驶 车牌检测和识别》系列文章请参考:
- 智能驾驶 车牌检测和识别(一)《CCPD车牌数据集》:https://blog.csdn.net/guyuealian/article/details/128704181
- 智能驾驶 车牌检测和识别(二)《YOLOv5实现车牌检测(含车牌检测数据集和训练代码)》:https://blog.csdn.net/guyuealian/article/details/128704068
- 智能驾驶 车牌检测和识别(三)《CRNN和LPRNet实现车牌识别(含车牌识别数据集和训练代码)》:https://blog.csdn.net/guyuealian/article/details/128704209
- 智能驾驶 车牌检测和识别(四)《Android实现车牌检测和识别(可实时车牌识别)》:https://blog.csdn.net/guyuealian/article/details/128704242
- 智能驾驶 车牌检测和识别(五)《C++实现车牌检测和识别(可实时车牌识别)》:https://blog.csdn.net/guyuealian/article/details/128704276
- 智能驾驶 红绿灯检测(一)《红绿灯(交通信号灯)数据集》:https://blog.csdn.net/guyuealian/article/details/128222850
- 智能驾驶 红绿灯检测(二)《YOLOv5实现红绿灯检测(含红绿灯数据集+训练代码)》:https://blog.csdn.net/guyuealian/article/details/128240198
- 智能驾驶 红绿灯检测(三)《Android实现红绿灯检测(含Android源码 可实时运行)》:https://blog.csdn.net/guyuealian/article/details/128240334
-
智能驾驶 车辆检测(一)《UA-DETRAC BITVehicle车辆检测数据集》:https://blog.csdn.net/guyuealian/article/details/127907325
-
智能驾驶 车辆检测(二)《YOLOv5实现车辆检测(含车辆检测数据集+训练代码)》:https://blog.csdn.net/guyuealian/article/details/128099672
-
智能驾驶 车辆检测(三)《Android实现车辆检测(含Android源码 可实时运行)》:https://blog.csdn.net/guyuealian/article/details/128190532
2. 车辆检测数据集说明
(1)车辆检测数据集
目前收集了约10W+的车辆检测数据集:UA-DETRAC车辆检测数据集+Vehicle-Dataset车辆检测数据集+BITVehicle车辆检测数据集:
关于车辆检测数据集使用说明和下载,详见另一篇博客说明:《UA-DETRAC BITVehicle车辆检测数据集(含下载地址)》
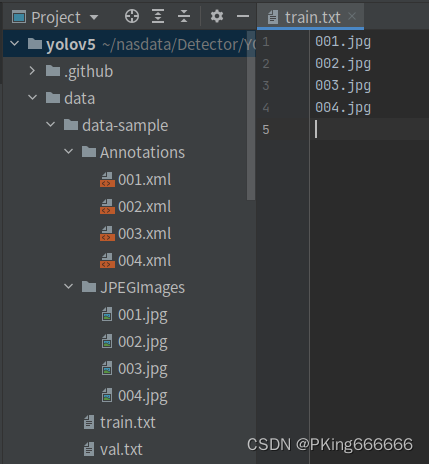
(2)自定义数据集
如果需要增/删类别数据进行训练,或者需要自定数据集进行训练,可参考如下步骤:
- 采集图片,建议不少于200张图片
- 使用Labelme等标注工具,对目标进行拉框标注:labelme工具:GitHub - wkentaro/labelme: Image Polygonal Annotation with Python (polygon, rectangle, circle, line, point and image-level flag annotation).
- 将标注格式转换为VOC数据格式,参考工具:labelme/labelme2voc.py at main · wkentaro/labelme · GitHub
- 生成训练集train.txt和验证集val.txt文件列表
- 修改engine/configs/voc_local.yaml的train和val的数据路径
- 重新开始训练
3. 基于YOLOv5的车辆检测模型训练
(1)YOLOv5安装
训练Pipeline采用YOLOv5: https://github.com/ultralytics/yolov5 , 原始代码训练需要转换为YOLO的格式,不支持VOC的数据格式。为了适配VOC数据,本人新增了LoadVOCImagesAndLabels用于解析VOC数据集,以便正常训练。另外,为了方便测试,还增加demo.py文件,可支持对图片,视频和摄像头的测试。
Python依赖环境,使用pip安装即可,项目代码都在Ubuntu系统和Windows系统验证正常运行,请放心使用;若出现异常,大概率是相关依赖包版本没有完全对应
matplotlib>=3.2.2
numpy>=1.18.5
opencv-python>=4.1.2
Pillow
PyYAML>=5.3.1
scipy>=1.4.1
torch>=1.7.0
torchvision>=0.8.1
tqdm>=4.41.0
tensorboard>=2.4.1
seaborn>=0.11.0
pandas
thop # FLOPs computation
pybaseutils==0.6.5项目安装教程请参考(初学者入门,麻烦先看完下面教程,配置好开发环境):
(2)准备Train和Test数据
下载车辆检测数据集,总共约10W+的图片:UA-DETRAC车辆检测数据集+Vehicle-Dataset车辆检测数据集+BITVehicle车辆检测数据集
考虑到UA-DETRAC车辆检测数据集比较大,其训练的模型的检测效果相对比较好,因此后续以UA-DETRAC车辆检测数据集为示例,说明训练过程。其他数据集训练,请根据自己环境,适当修改即可。
(3)配置数据文件
- 修改训练和测试数据的路径:engine/configs/voc_local.yaml
- 注意数据路径分隔符使用【/】,不是【\】
- 项目不要出现含有中文字符的目录文件或路径,否则会出现很多异常!!!!!!!!
# Train/val/test sets as 1) dir: path/to/imgs, 2) file: path/to/imgs.txt, or 3) list: [path/to/imgs1, path/to/imgs2, ..]
# 数据路径
path: "" # dataset root dir
# 注意数据路径分隔符使用【/】,不是【\】
# 项目不要出现含有中文字符的目录文件或路径,否则会出现很多异常!!!!!!!!
train:
- "D:/path/to/UA-DETRAC/DETRAC-VOC/DETRAC-train-voc/train.txt"
- "D:/path/to/UA-DETRAC/DETRAC-VOC/DETRAC-test-voc/test.txt" # 做模型性能测试时,测试集不要加入,避免指标有歧义
val:
- "D:/path/to/UA-DETRAC/DETRAC-VOC/DETRAC-test-voc/test.txt"
test: # test images (optional)
data_type: voc
# 1.设置类别个数,和要训练的类别名称,ID号从0开始递增
nc: 4 # number of classes
names: { 'car': 0, 'bus': 1, 'van': 2,'others': 3 }
# 2.如果你想合并几个类别进行训练,比如将'[car','bus','van']看作一类,others看作另一类,则
#nc: 2 # number of classes
#names: { 'car': 0, 'bus': 0, 'van': 0,'others': 1 }
# 3.如果你想合并所有类别为一个大类,进行训练: unique表示合并所有类为单独一个类别
#nc: 1 # number of classes
#names: { "unique": 0 }- 如果你想合并几个类别进行训练,比如将'[car','bus','van']看作一类,others看作另一类,则修改engine/configs/voc_local.yaml:
nc: 2 # number of classes
names: { 'car': 0, 'bus': 0, 'van': 0,'others': 1 }- 如果你想合并所有类别为一个大类,进行训练: unique表示合并所有类为单独一个类别
nc: 1 # number of classes
names: { "unique": 0 }(4)配置模型文件
官方YOLOv5给出了YOLOv5l,YOLOv5m,YOLOv5s等模型。考虑到手机端CPU/GPU性能比较弱鸡,直接部署yolov5s运行速度十分慢。所以本人在yolov5s基础上进行模型轻量化处理,即将yolov5s的模型的channels通道数全部都减少一半,并且模型输入由原来的640×640降低到416×416或者320×320,该轻量化的模型我称之为yolov5s05。从性能来看,yolov5s05比yolov5s快5多倍,而mAP下降了10%(0.57→0.47),对于手机端,这精度勉强可以接受。
下面是yolov5s05和yolov5s的参数量和计算量对比:
| 模型 | input-size | params(M) | GFLOPs | mAP0.5 |
| yolov5s | 640×640 | 7.2 | 16.5 | 0.57192 |
| yolov5s05 | 416×416 | 1.7 | 1.8 | 0.47022 |
| yolov5s05 | 320×320 | 1.7 | 1.1 | 0.44788 |
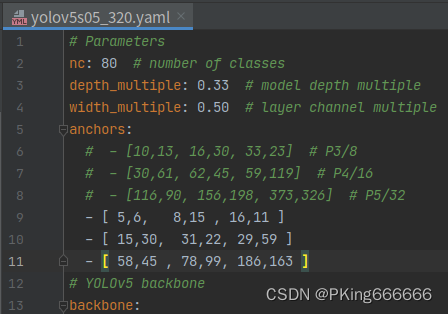
(5)重新聚类Anchor(可选)
官方yolov5s的Anchor是基于COCO数据集进行聚类获得(详见models/yolov5s.yaml文件)
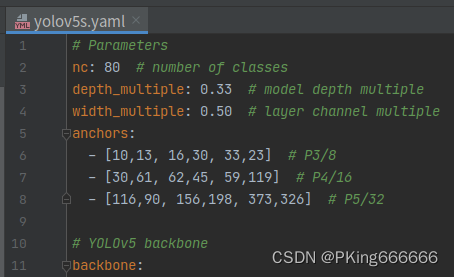
对于yolov5s05的Anchor,由于输入大小640缩小到320,其对应的Anchor也应该缩小一倍:
一点建议:
- 官方yolov5s的Anchor是基于COCO数据集进行聚类获得,不同数据集需要做适当的调整,其最优Anchor建议重新进行聚类 。
- 当然你要是觉得麻烦就跳过,不需要重新聚类Anchor,这个影响不是特别大。如果你需要重新聚类,请参考engine/kmeans_anchor/demo.py文件
(6)开始训练
整套训练代码非常简单操作,用户只需要将相同类别的数据放在同一个目录下,并填写好对应的数据路径,即可开始训练了。
- 修改训练超参文件: data/hyps/hyp.scratch-v1.yaml (可以修改训练学习率,数据增强等方式,使用默认即可)
- Linux系统终端运行,训练yolov5s或轻量化版本yolov5s05_416或者yolov5s05_320 (选择其中一个训练即可)
#!/usr/bin/env bash
#--------------训练yolov5s--------------
# 输出项目名称路径
project="runs/yolov5s_640"
# 训练和测试数据的路径
data="engine/configs/voc_local.yaml"
# YOLOv5模型配置文件
cfg="yolov5s.yaml"
# 训练超参数文件
hyp="data/hyps/hyp.scratch-v1.yaml"
# 预训练文件
weights="engine/pretrained/yolov5s.pt"
python train.py --data $data --cfg $cfg --hyp $hyp --weights $weights --batch-size 16 --imgsz 640 --workers 4 --project $project
#--------------训练轻量化版本yolov5s05_416--------------
# 输出项目名称路径
project="runs/yolov5s05_416"
# 训练和测试数据的路径
data="engine/configs/voc_local.yaml"
# YOLOv5模型配置文件
cfg="yolov5s05_416.yaml"
# 训练超参数文件
hyp="data/hyps/hyp.scratch-v1.yaml"
# 预训练文件
weights="engine/pretrained/yolov5s.pt"
python train.py --data $data --cfg $cfg --hyp $hyp --weights $weights --batch-size 16 --imgsz 416 --workers 4 --project $project
#--------------训练轻量化版本yolov5s05_320--------------
# 输出项目名称路径
project="runs/yolov5s05_320"
# 训练和测试数据的路径
data="engine/configs/voc_local.yaml"
# YOLOv5模型配置文件
cfg="yolov5s05_320.yaml"
# 训练超参数文件
hyp="data/hyps/hyp.scratch-v1.yaml"
# 预训练文件
weights="engine/pretrained/yolov5s.pt"
python train.py --data $data --cfg $cfg --hyp $hyp --weights $weights --batch-size 16 --imgsz 320 --workers 4 --project $project
- Windows系统终端运行,yolov5s或轻量化版本yolov5s05_416或者yolov5s05_320 (选择其中一个训练即可)
#!/usr/bin/env bash
#--------------训练yolov5s--------------
python train.py --data engine/configs/voc_local.yaml --cfg yolov5s.yaml --hyp data/hyps/hyp.scratch-v1.yaml --weights engine/pretrained/yolov5s.pt --batch-size 16 --imgsz 640 --workers 4 --project runs/yolov5s_640
#--------------训练轻量化版本yolov5s05_416--------------
python train.py --data engine/configs/voc_local.yaml --cfg yolov5s05_416.yaml --hyp data/hyps/hyp.scratch-v1.yaml --weights engine/pretrained/yolov5s.pt --batch-size 16 --imgsz 416 --workers 4 --project runs/yolov5s05_416
#--------------训练轻量化版本yolov5s05_320--------------
python train.py --data engine/configs/voc_local.yaml --cfg yolov5s05_320.yaml --hyp data/hyps/hyp.scratch-v1.yaml --weights engine/pretrained/yolov5s.pt --batch-size 16 --imgsz 320 --workers 4 --project runs/yolov5s05_320
- 开始训练:
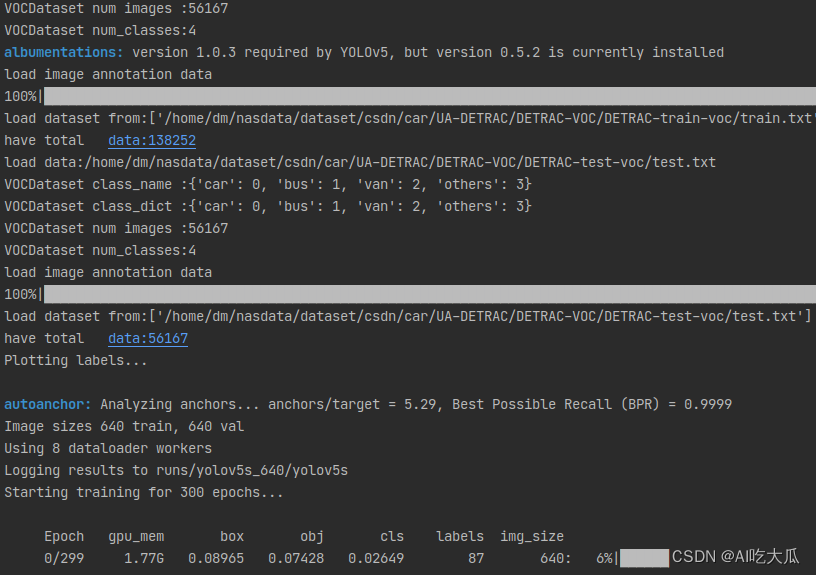
- 训练数据量比较大,训练时间比较长,请耐心等待哈
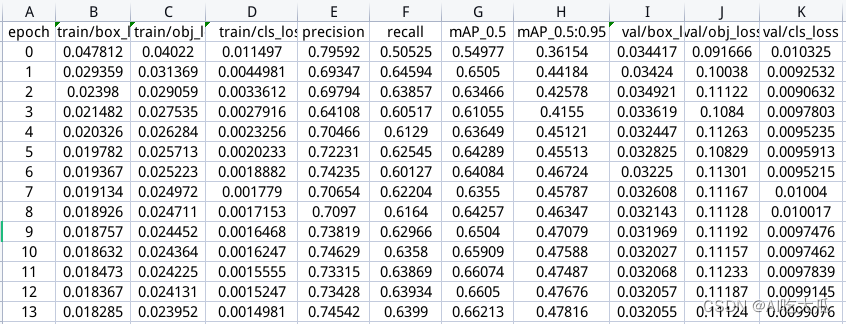
- 训练完成后,在模型输出目录中有个results.csv文件,记录每个epoch测试的结果,如loss,mAP等信息
训练模型收敛后,yolov5s车辆检测的mAP指标大约mAP_0.5=0.57192;而,yolov5s05_416 mAP_0.5=0.47022左右;yolov5s05_320 mAP_0.5=0.44788左右
(7)可视化训练过程
训练过程可视化工具是使用Tensorboard,使用方法:
# 基本方法
tensorboard --logdir=path/to/log/
# 例如
tensorboard --logdir ./data/model/yolov5s_640 |
 |
 |
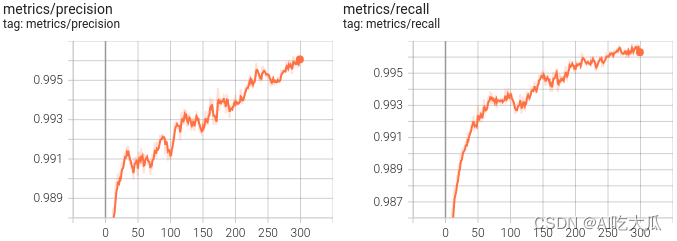 |
当然,在输出目录,也保存很多性能指标的图片
- 这是训练epoch的可视化图,可以看到mAP随着Epoch训练,逐渐提高

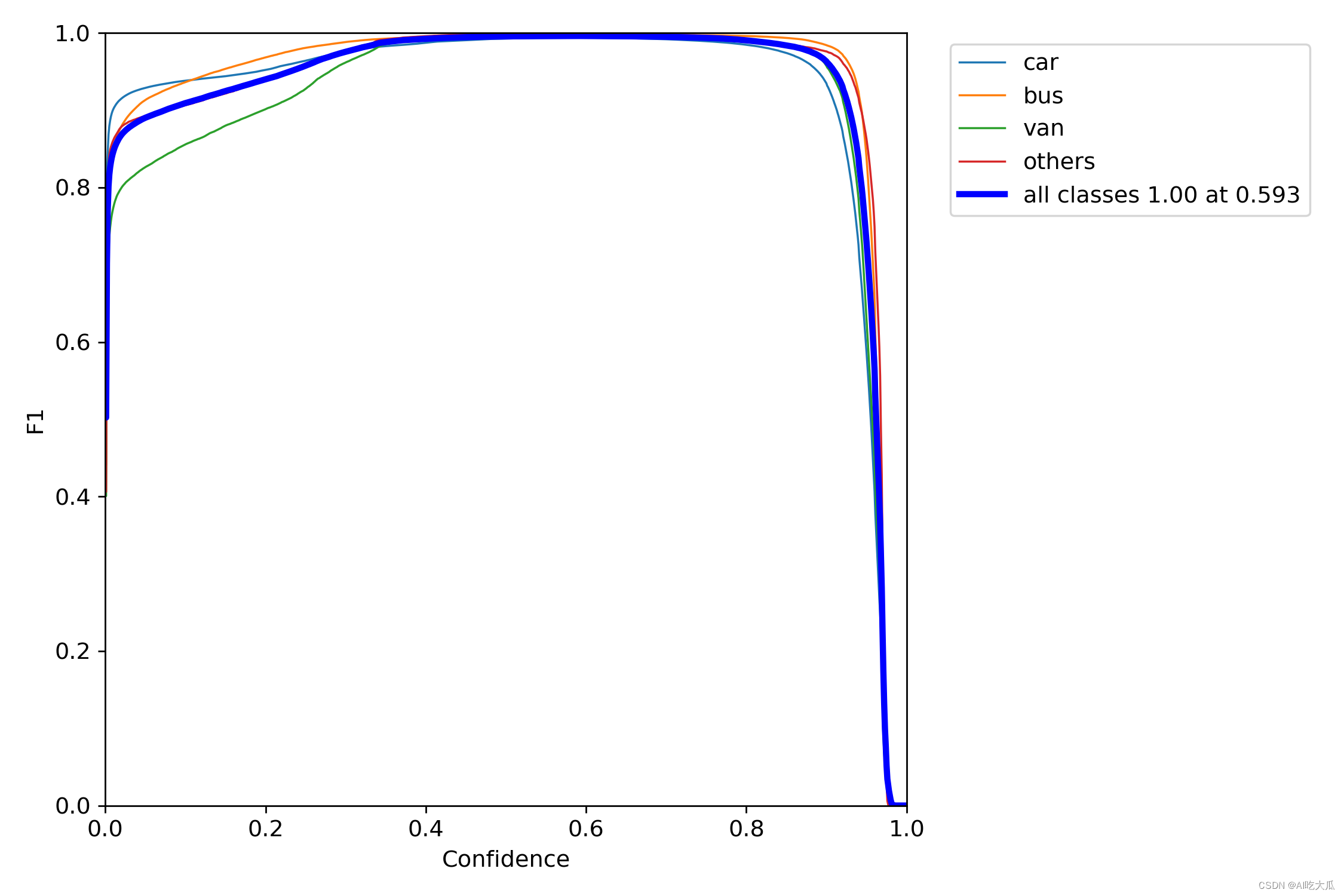
- 这是每个类别的F1-Score分数
- 这是模型的PR曲线

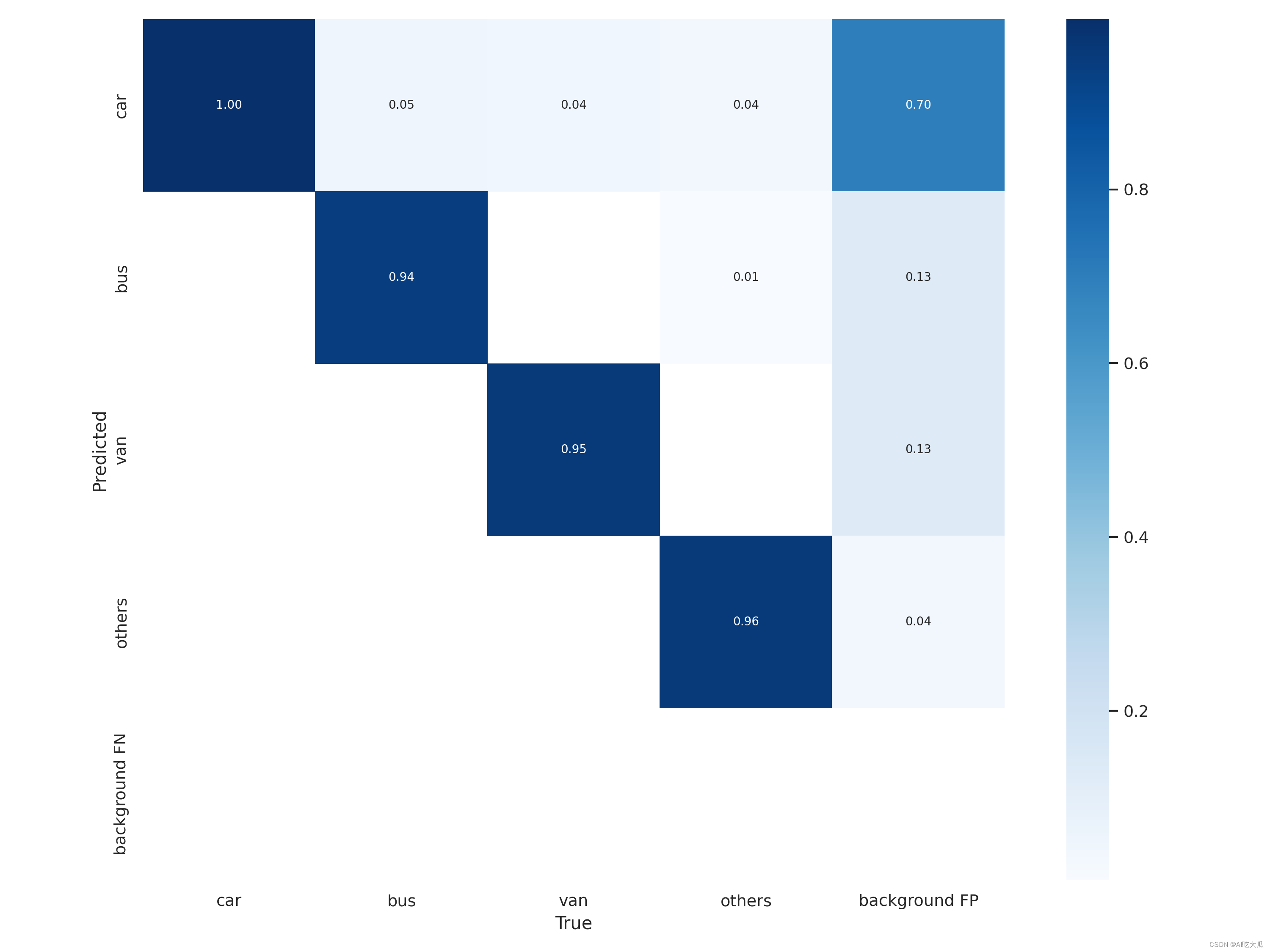
- 这是混淆矩阵:
(8)常见的错误
- YOLOv5 BUG修复记录
- 项目安装教程请参考:项目开发使用教程和常见问题和解决方法
- 项目不要出现含有中文字符的目录文件或路径,否则会出现很多异常!!!!!!!!
4. Python版本车辆检测效果
demo.py文件用于推理和测试模型的效果,填写好配置文件,模型文件以及测试图片即可运行测试了
- 测试图片
# 测试图片(Linux系统)
image_dir='data/car-test' # 测试图片的目录
weights="data/model/yolov5s_640/weights/best.pt" # 模型文件
out_dir="runs/car-result" # 保存检测结果
python demo.py --image_dir $image_dir --weights $weights --out_dir $out_dirWindows系统,请将$image_dir, $weights ,$out_dir等变量代替为对应的变量值即可,如
# 测试图片(Windows系统)
python demo.py --image_dir data/car-test --weights data/model/yolov5s_640/weights/best.pt --out_dir runs/car-result
- 测试视频文件
# 测试视频文件(Linux系统)
video_file="data/car-video.mp4" # path/to/video.mp4 测试视频文件,如*.mp4,*.avi等
weights="data/model/yolov5s_640/weights/best.pt" # 模型文件
out_dir="runs/car-result" # 保存检测结果
python demo.py --video_file $video_file --weights $weights --out_dir $out_dir# 测试视频文件(Windows系统)
python demo.py --video_file data/car-video.mp4 --weights data/model/yolov5s_640/weights/best.pt --out_dir runs/car-result
- 测试摄像头
# 测试摄像头(Linux系统)
video_file=0 # 测试摄像头ID
weights="data/model/yolov5s_640/weights/best.pt" # 模型文件
out_dir="runs/car-result" # 保存检测结果
python demo.py --video_file $video_file --weights $weights --out_dir $out_dir
# 测试摄像头(Windows系统)
python demo.py --video_file 0 --weights data/model/yolov5s_640/weights/best.pt --out_dir runs/car-result
 |
 |
 |
 |
如果想进一步提高模型的性能,可以尝试:
- 增加训练的样本数据: 目前只有10W+的数据量,建议根据自己的业务场景,采集相关数据,提高模型泛化能力
- 使用参数量更大的模型: 本教程使用的YOLOv5s,其参数量才7.2M,而YOLOv5x的参数量有86.7M,理论上其精度更高,但推理速度也较慢。
- 尝试不同数据增强的组合进行训练
5. Android版本车辆检测效果
已经完成Android版本车辆检测模型算法开发,APP在普通Android手机上可以达到实时的检测和识别效果,CPU(4线程)约30ms左右,GPU约20ms左右 ,基本满足业务的性能需求。详细说明请查看《Android实现车辆检测(含Android源码,可实时运行)》
Android Demo体验:
6.项目源码下载
整套项目源码内容包含:车辆检测数据集 + YOLOv5训练代码和测试代码
整套项目下载地址:深度学习目标检测:YOLOv5实现车辆检测(含车辆检测数据集+训练代码)
(1)车辆检测数据集:UA-DETRAC BITVehicle车辆检测数据集(含下载地址)
- UA-DETRAC车辆检测数据集
- Vehicle-Dataset车辆检测数据集
- BIT-Vehicle车辆检测数据集
(2)YOLOv5训练代码和测试代码(Pytorch)
- 整套YOLOv5项目工程的训练代码和测试代码
- 支持高精度版本yolov5s训练和测试
- 支持轻量化版本yolov5s05_320和yolov5s05_416训练和测试
- 项目源码自带训练好的模型文件,可直接运行测试Demo
- 根据本篇博文说明,简单配置即可开始训练
更多项目《智能驾驶 车牌检测和识别》系列文章请参考:
- 智能驾驶 车牌检测和识别(一)《CCPD车牌数据集》:https://blog.csdn.net/guyuealian/article/details/128704181
- 智能驾驶 车牌检测和识别(二)《YOLOv5实现车牌检测(含车牌检测数据集和训练代码)》:https://blog.csdn.net/guyuealian/article/details/128704068
- 智能驾驶 车牌检测和识别(三)《CRNN和LPRNet实现车牌识别(含车牌识别数据集和训练代码)》:https://blog.csdn.net/guyuealian/article/details/128704209
- 智能驾驶 车牌检测和识别(四)《Android实现车牌检测和识别(可实时车牌识别)》:https://blog.csdn.net/guyuealian/article/details/128704242
- 智能驾驶 车牌检测和识别(五)《C++实现车牌检测和识别(可实时车牌识别)》:https://blog.csdn.net/guyuealian/article/details/128704276
- 智能驾驶 红绿灯检测(一)《红绿灯(交通信号灯)数据集》:https://blog.csdn.net/guyuealian/article/details/128222850
- 智能驾驶 红绿灯检测(二)《YOLOv5实现红绿灯检测(含红绿灯数据集+训练代码)》:https://blog.csdn.net/guyuealian/article/details/128240198
- 智能驾驶 红绿灯检测(三)《Android实现红绿灯检测(含Android源码 可实时运行)》:https://blog.csdn.net/guyuealian/article/details/128240334
-
智能驾驶 车辆检测(一)《UA-DETRAC BITVehicle车辆检测数据集》:https://blog.csdn.net/guyuealian/article/details/127907325
-
智能驾驶 车辆检测(二)《YOLOv5实现车辆检测(含车辆检测数据集+训练代码)》:https://blog.csdn.net/guyuealian/article/details/128099672
-
智能驾驶 车辆检测(三)《Android实现车辆检测(含Android源码 可实时运行)》:https://blog.csdn.net/guyuealian/article/details/128190532
智能推荐
源代码图纸文档防泄密场景方案分析-程序员宅基地
文章浏览阅读161次,点赞5次,收藏3次。财务数据、员工信息、工资信息、客户和业务数据等被员工非法获取、外泄
React学习记录-程序员宅基地
文章浏览阅读936次,点赞22次,收藏26次。React核心基础
Linux查磁盘大小命令,linux系统查看磁盘空间的命令是什么-程序员宅基地
文章浏览阅读2k次。linux系统查看磁盘空间的命令是【df -hl】,该命令可以查看磁盘剩余空间大小。如果要查看每个根路径的分区大小,可以使用【df -h】命令。df命令以磁盘分区为单位查看文件系统。本文操作环境:red hat enterprise linux 6.1系统、thinkpad t480电脑。(学习视频分享:linux视频教程)Linux 查看磁盘空间可以使用 df 和 du 命令。df命令df 以磁..._df -hl
Office & delphi_range[char(96 + acolumn) + inttostr(65536)].end[xl-程序员宅基地
文章浏览阅读923次。uses ComObj;var ExcelApp: OleVariant;implementationprocedure TForm1.Button1Click(Sender: TObject);const // SheetType xlChart = -4109; xlWorksheet = -4167; // WBATemplate xlWBATWorksheet = -4167_range[char(96 + acolumn) + inttostr(65536)].end[xlup]
若依 quartz 定时任务中 service mapper无法注入解决办法_ruoyi-quartz无法引入ruoyi-admin的service-程序员宅基地
文章浏览阅读2.3k次。上图为任务代码,在任务具体执行的方法中使用,一定要写在方法内使用SpringContextUtil.getBean()方法实例化Spring service类下边是ruoyi-quartz模块中util/SpringContextUtil.java(已改写)import org.springframework.beans.BeansException;import org.springframework.context.ApplicationContext;import org.s..._ruoyi-quartz无法引入ruoyi-admin的service
CentOS7配置yum源-程序员宅基地
文章浏览阅读2w次,点赞10次,收藏77次。yum,全称“Yellow dog Updater, Modified”,是一个专门为了解决包的依赖关系而存在的软件包管理器。可以这么说,yum 是改进型的 RPM 软件管理器,它很好的解决了 RPM 所面临的软件包依赖问题。yum 在服务器端存有所有的 RPM 包,并将各个包之间的依赖关系记录在文件中,当管理员使用 yum 安装 RPM 包时,yum 会先从服务器端下载包的依赖性文件,通过分析此文件从服务器端一次性下载所有相关的 RPM 包并进行安装。_centos7配置yum源
随便推点
【方位估计】基于MUSIC算法、加权MUSIC算法和ROOT-MUSIC算法方位估计附Matlab代码-程序员宅基地
文章浏览阅读921次,点赞17次,收藏19次。方位估计是信号处理领域中一个重要的问题,它涉及到了信号的方向和角度的估计。在无线通信、雷达、声呐等领域,方位估计都有着重要的应用。本文将介绍三种常用的方位估计算法:MUSIC算法、加权MUSIC算法和ROOT-MUSIC算法。首先我们来介绍MUSIC算法。MUSIC算法是一种基于信号子空间的方法,它利用信号子空间的特性来实现方位估计。
DZMFullPage - 前端分页动画插件,兼容IE9+,支持Vue-程序员宅基地
文章浏览阅读73次。分页指定DOM页页页页页页导入插件。
【图像分割】基于Crow搜索优化模糊聚类算法的医学图像分割研究附matlab代码-程序员宅基地
文章浏览阅读1.1k次,点赞30次,收藏24次。图像分割是医学图像分析中的关键步骤,它可以将图像中的不同组织或结构区分开来。模糊聚类算法是一种常用的图像分割方法,但其聚类中心的选择对分割结果有很大的影响。本文提出了一种基于 Crow 搜索优化(CSO)算法的模糊聚类算法,用于医学图像分割。CSO 是一种新型的群智能优化算法,具有收敛速度快、鲁棒性强等优点。本文将 CSO 应用于模糊聚类算法的聚类中心优化,以提高分割精度。
Android开发-Android常用组件-TextView文本框-程序员宅基地
文章浏览阅读1k次。04 常用组件4.1 TextViewTextView (文本框),用于显示文本的一个控件。文本的字体尺寸单位为sp :sp: scaled pixels(放大像素). 主要用于字体显示。文本常用属性:属性名作用id为TextView设置一个组件id,根据id,我们可以在Java代码中通过findViewById()的方法获取到该..._
STM32单片机示例:多个定时器同步触发启动_stm32 定时器同步-程序员宅基地
文章浏览阅读3.7k次,点赞3次,收藏14次。多个定时器同步触发启动是一种比较实用的功能,这里将对此做个示例说明。_stm32 定时器同步
android launcher分析和修改10,Android Launcher分析和修改9——Launcher启动APP流程(转载)...-程序员宅基地
文章浏览阅读348次。出处 : http://www.cnblogs.com/mythou/p/3187881.html本来想分析AppsCustomizePagedView类,不过今天突然接到一个临时任务。客户反馈说机器界面的图标很难点击启动程序,经常点击了没有反应,Boss说要优先解决这问题。没办法,只能看看是怎么回事。今天分析一下Launcher启动APP的过程。从用户点击到程序启动的流程,下面针对WorkSpa..._回调bubbletextview