【嵌入式实验】南航嵌入式实验报告——GPIO实验_南航nuaa嵌入式系统实验报告-程序员宅基地
技术标签: stm32 arm开发 # 嵌入式系统原理与应用 单片机
嵌入式系统原理与应用实验报告-GPIO实验
文章目录
一、实验目的
1.1 基于GPIO的LED跑马灯实验
- 熟悉MDK-ARM基础开发环境
- 掌握工程模板的使用
- 掌握GPIO输出的方法,包括汇编、寄存器操作和基于固件库的GPIO输出操作方法
- 熟悉在本嵌入式实验开发平台上运行一个无操作系统环境下程序设计的方法
1.2 基于GPIO的简单人机交互接口实验
- 掌握GPIO初试化操作
- 掌握GPIO输入输出功能和基于寄存器和固件库的GPIO输入输出方法
- 练习添加代码,能够灵活应用GPIO端口进行输入/输出操作
1.3 基于GPIO的直流电机控制实验
- 掌握GPIO初试化操作
- 掌握GPIO输入输出功能和基于寄存器和固件库的GPIO输入输出方法
- 掌握直流电机控制方式
二、实验原理(硬件连接及软件流程、简单原理说明)
2.1 实验设备
- 硬件:PC一台、WEEEDK嵌入式实验开发平台一套
- 软件:操作系统Windows、MDK-ARM 集成开发环境
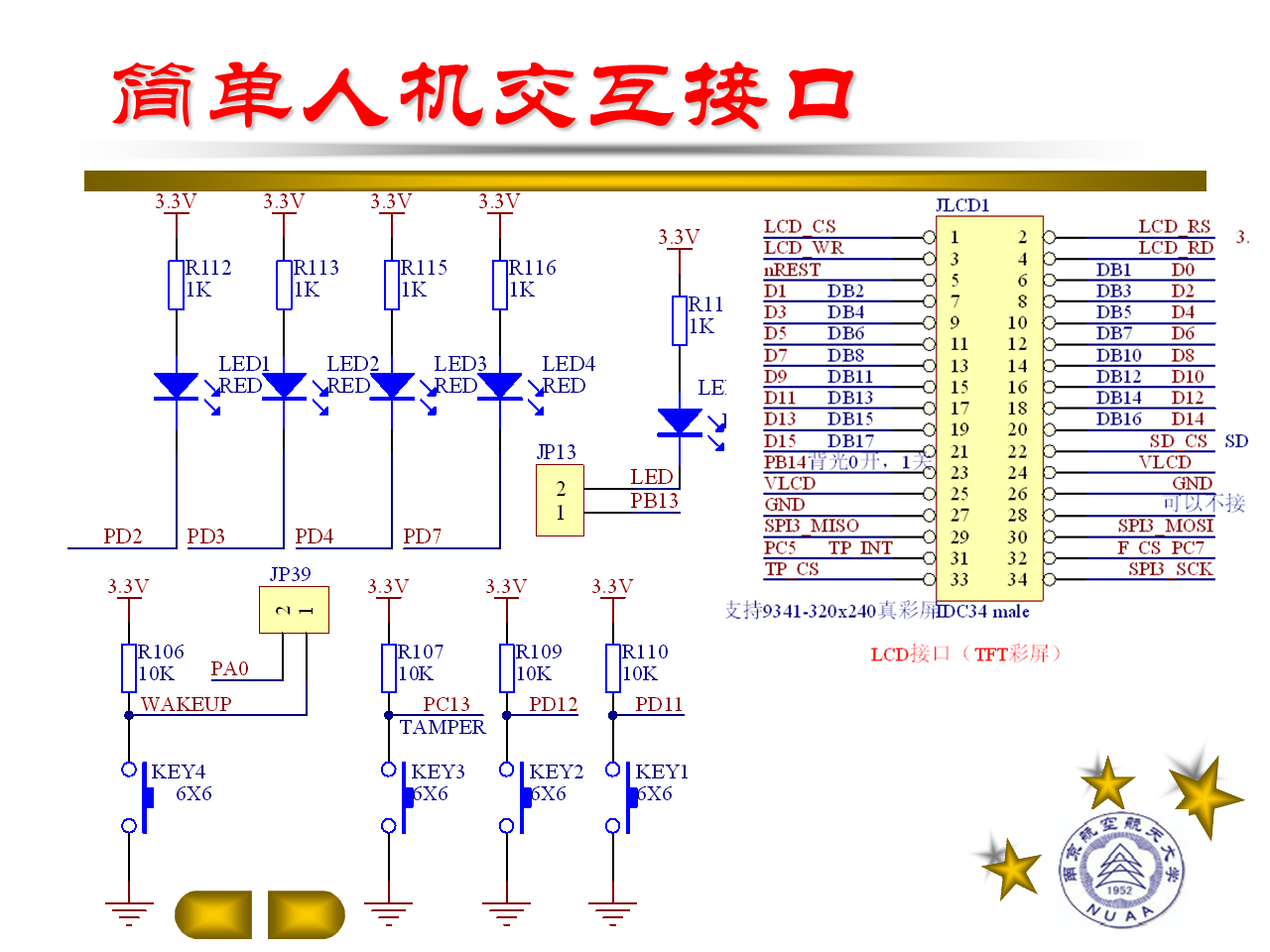
2.2 实验硬件连接图
2.3 实验简单原理
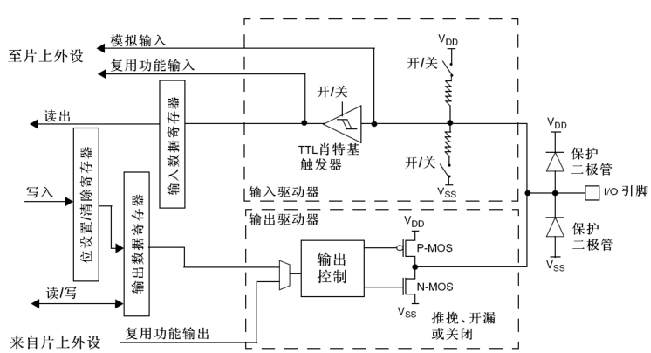
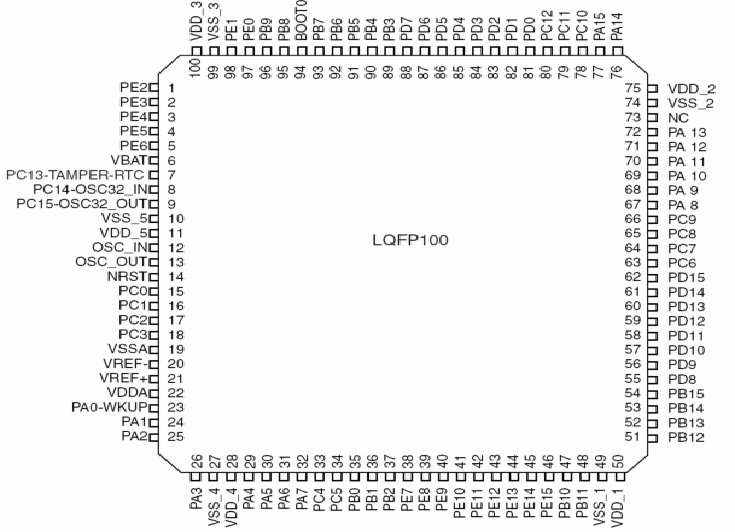
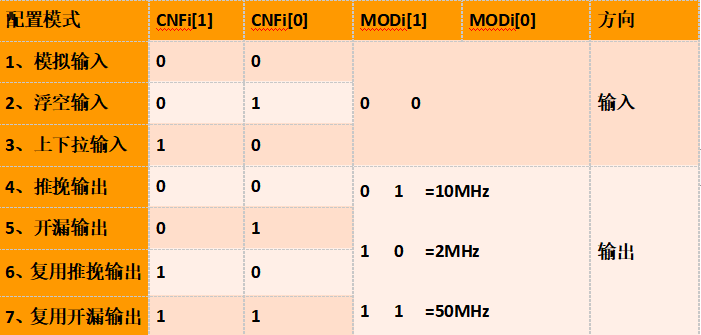
STM32F10x微控制器具有7个GPIO端口,分别为GPIOA、GPIOB、GPIOC、GPIOD、GPIOE、GPIOF、GPIOG,每个GPIO端口有16个I/O引脚,可配置为输入或输出,输入缓冲,输出锁存。配置寄存器GPIO_CRL和GPIO_CRH可以分别对0-7和8-15引脚进行配置,主要包括通过MODE配置为输入还是输出,通过CNF结合MODE可配置为采用输入哪种方式,输出采用哪种方式。
三、实验内容与实验步骤
3.1 基于GPIO的LED跑马灯实验
3.1.1 实验内容
- 让LED1、LED2、LED3、LED4轮流闪光(跑马灯)
- 在步骤(1)完成后,跑马灯行列加入LED5,让ED1、LED2、LED3、LED4、LED5轮流闪光
3.1.2 实验步骤
(1) 连接+5V电源到开发板,并打开电源开关,将ST-LINK 仿真器连接到WEEEDK嵌入式系统实验开发板的 JTAG插座上,USB 插头连接到PC的USB插口。如果没有驱动请安装ST-LNK 驱动,直到在设备管理器上看到STMicroelectronics STLink dongle为止。
(2) 复制"GPIO-LED跑马灯"文件夹中的所有内容到D盘,双击 GPIO-LED跑马灯实验的\Project\Project.uvprojx 实验工程文件,打开实验工程,阅读 main()函数。
(3) 按F7 功能键编译并链接工程。
(4) 按Ctrl+F5键或单击调试按钮,进入集成调试环境。
(5) 练习使用F10功能键单步执行、Crl+F10键执行到光标处以及F5功能键全速执行等断方式,在看执行代码后LED1~LED4指示灯的变化情况。
(6) 在全速运行时,除了观察跑马灯闪光外,还要观察外设窗口,查看相关寄存器的值及寄存器的变化。
(7) 通过改变GPIOD输出寄存器的ODR的值ODRi来管擦和LED亮灭情况
修改ODRi值,当ODRi=1时,灯灭;当ODRi=0时,灯亮
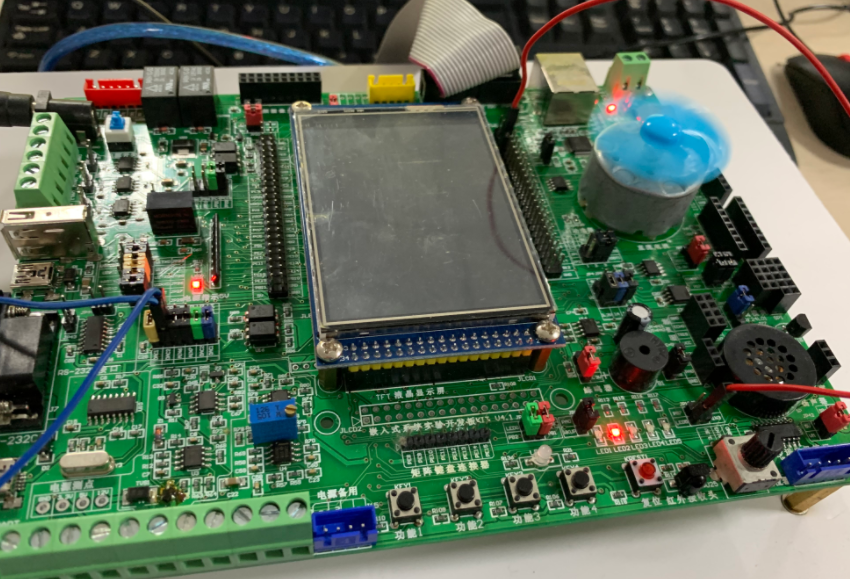
(8) 退出调试返回编辑模式,进行实验内容(2),用杜邦线连接JP13-LED5和P2-PB7,使PB7与LED5连接
连接后如下图所示
(9) 修改GPIO初试化程序,包括是能GPIOB时钟,配置PB7为10MHz推挽输出并初始化为逻辑1(LED5灭)
添加的程序块为
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); /*使能PB口时钟*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;/*选择PD7引脚*/
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz; /*频率10MHz*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; /*推挽输出*/
GPIO_Init(GPIOB, &GPIO_InitStructure); /*初始化GPIOB端口*/
/*---------初始化状态四个LED全灭OFF------------*/
GPIO_SetBits(GPIOB,GPIO_Pin_7);/*PB7输出为高电平,ED5灭*/
(10)在main()循环体中添加让LED5闪烁的代码
添加的程序块为 下面为修改后的循环体
while (1)
{
GPIO_ResetBits(GPIOD, GPIO_Pin_2); /* PD2=0 LED1亮 */
Delayms(n); /* 延时 */
GPIO_SetBits(GPIOD, GPIO_Pin_2); /* PD2=1 LED1灭 */
Delayms(n); /* 延时 */
GPIO_ResetBits(GPIOD, GPIO_Pin_3); /* PD3=0 LED2亮 */
Delayms(n); /* 延时 */
GPIO_SetBits(GPIOD, GPIO_Pin_3); /* PD3=1 LED2灭 */
Delayms(n); /* 延时 */
GPIO_ResetBits(GPIOD, GPIO_Pin_4); /* PD4=0 LED3亮 */
Delayms(n); /* 延时 */
GPIO_SetBits(GPIOD, GPIO_Pin_4); /* PD4=1 LED4灭 */
Delayms(n); /* 延时 */
GPIO_ResetBits(GPIOD, GPIO_Pin_7); /* PD7=0 LED4亮 */
Delayms(n); /* 延时 */
GPIO_SetBits(GPIOD, GPIO_Pin_7); /* PD7=1 LED4灭 */
Delayms(n); /* 延时 */
GPIO_ResetBits(GPIOB, GPIO_Pin_7); /* PB7=0 LED5亮 */
Delayms(n); /* 延时 */
GPIO_SetBits(GPIOB, GPIO_Pin_7); /* PB7=1 LED5灭 */
Delayms(n); /* 延时 */
}
(11)按F7键编译并链接,然后排除所有错误,最后编译链接
(12)按CTRL+F5进入调试环境
(13)按F5功能键运行程序,查看跑马灯显示是否正确,不正确的话修改代码,继续调试到正确为止。运行时观察GPIOB窗口输出寄存器的变化
(14)试着改变闪光时间,观察显示效果
修改以下函数即可
#define n 500 /*延时时间常数*/
void Delayms(uint16_t N)
{
uint32_t i;
for (i = 0; i < (8000 * N); i++)
;
}
(15)请用寄存器操作方法实现LED1~LED5跑马灯显示
按下面所示方式进行修改即可
GPIOD->ODR &= ~(1<<2) //让LED1亮
GPIOD->ODR |= (1<<2) //让LED1灭
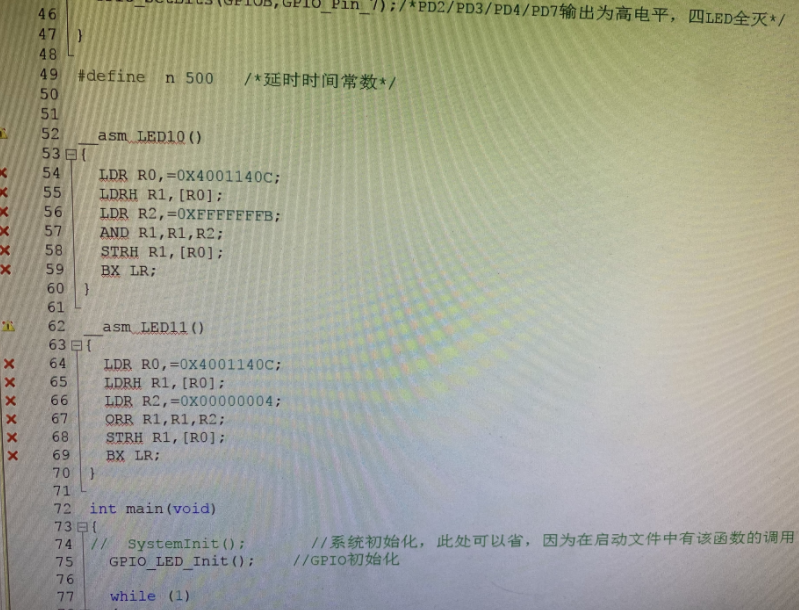
(16)使用汇编语言让LED1闪烁
添加下面的两个函数
__asm LED10() //LED1 亮
{
LDR R0, = 0X4001140C;
LDRH R1, [R0];
LDR R2, = 0XFFFFFFFB;
AND R1, R1, R2;
STRH R1, [R0];
BX LR;
}
__asm LED11() //LED1 灭
{
LDR R0, = 0X4001140C;
LDRH R1, [R0];
LDR R2, = 0X00000004;
ORR R1, R1, R2;
STRH R1, [R0];
BX LR;
}
在主函数里调用即可
int main(void)
{
// SystemInit(); //系统初始化,此处可以省,因为在启动文件中有该函数的调用
GPIO_LED_Init(); // GPIO初始化
while (1)
{
LED10();
Delayms(n);
LED11();
Delayms(n);
}
}
3.1.3 完整实验代码
初始代码
/************************************************************************************
** WEEEDK NUAA_CM3_107实验开发板(V4.1/V4.2)
** GPIO-LED应用跑马灯实验
** 操作及现象:下载程序运行后看到四个LED指示灯闪光(轮流亮灭,似跑马灯)
** 版 本:V4.1
** 作 者:NUAA
** 完成日期: 2017.3.18
************************************************************************************/
#include "stm32f10x_conf.h"
/*********************************************
*函数名称:void Delayms(void)
*
*入口参数:N ms
*
*出口参数:无
*
*功能说明:简单延时N ms
**********************************************/
#define n 500 /*延时时间常数*/
void Delayms(uint16_t N)
{
uint32_t i;
for (i = 0; i < (8000 * N); i++)
;
}
void GPIO_LED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD, ENABLE); /*使能PD口时钟*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_7; /*选择PD2/PD3/PD4/PD7引脚*/
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz; /*频率10MHz*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; /*推挽输出*/
GPIO_Init(GPIOD, &GPIO_InitStructure); /*初始化GPIOD端口*/
/*---------初始化状态四个LED全灭OFF------------*/
GPIO_SetBits(GPIOD, GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_7); /*PD2/PD3/PD4/PD7输出为高电平,四LED全灭*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); /*使能PB口时钟*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; /*选择PD7引脚*/
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz; /*频率10MHz*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; /*推挽输出*/
GPIO_Init(GPIOB, &GPIO_InitStructure); /*初始化GPIOB端口*/
GPIO_SetBits(GPIOB, GPIO_Pin_7); /*PB7输出为高电平,ED5灭*/
}
__asm LED10()
{
LDR R0, = 0X4001140C;
LDRH R1, [R0];
LDR R2, = 0XFFFFFFFB;
AND R1, R1, R2;
STRH R1, [R0];
BX LR;
}
__asm LED11()
{
LDR R0, = 0X4001140C;
LDRH R1, [R0];
LDR R2, = 0X00000004;
ORR R1, R1, R2;
STRH R1, [R0];
BX LR;
}
int main(void)
{
// SystemInit(); //系统初始化,此处可以省,因为在启动文件中有该函数的调用
GPIO_LED_Init(); // GPIO初始化
while (1)
{
// GPIO_ResetBits(GPIOD, GPIO_Pin_2); /* PD2=0 LED1亮 */
// Delayms(n); /* 延时 */
// GPIO_SetBits(GPIOD, GPIO_Pin_2); /* PD2=1 LED1灭 */
// Delayms(n); /* 延时 */
// GPIO_ResetBits(GPIOD, GPIO_Pin_3); /* PD3=0 LED2亮 */
// Delayms(n); /* 延时 */
// GPIO_SetBits(GPIOD, GPIO_Pin_3); /* PD3=1 LED2灭 */
// Delayms(n); /* 延时 */
// GPIO_ResetBits(GPIOD, GPIO_Pin_4); /* PD4=0 LED3亮 */
// Delayms(n); /* 延时 */
// GPIO_SetBits(GPIOD, GPIO_Pin_4); /* PD4=1 LED4灭 */
// Delayms(n); /* 延时 */
// GPIO_ResetBits(GPIOD, GPIO_Pin_7); /* PD7=0 LED4亮 */
// Delayms(n); /* 延时 */
// GPIO_SetBits(GPIOD, GPIO_Pin_7); /* PD7=1 LED4灭 */
// Delayms(n); /* 延时 */
// GPIO_ResetBits(GPIOB, GPIO_Pin_7); /* PB7=0 LED5亮 */
// Delayms(n); /* 延时 */
// GPIO_SetBits(GPIOB, GPIO_Pin_7); /* PB7=1 LED5灭 */
// Delayms(n); /* 延时 */
LED10();
Delayms(n);
LED11();
Delayms(n);
}
}
3.2 基于GPIO的简单人机交互接口实验
3.2.1 实验内容
- 在没有按键按下时,让LED1,LED2,LED3,LED4轮流闪光,当KEY1按下时LED1闪光,当KEY2按下时LED2闪光,当KEY3按下时LED3闪光,当KEY4按下时LED4闪光。添加代码,补充功能是按下任意键,蜂鸣器均响一声。
3.2.2 实验步骤
(1) 连接+5V电源到开发板,并打开电源开关,将ST-LINK 仿真器连接到WEEEDK嵌入式系统实验开发板的 JTAG插座上,USB 插头连接到PC的USB插口。如果没有驱动请安装ST-LNK 驱动,直到在设备管理器上看到STMicroelectronics STLink dongle为止。
(2) 复制"GPIO-KEYLED跑马灯"文件夹中的所有内容到D盘,双击 GPIO-LED跑马灯实验的\Project\Project.uvprojx 实验工程文件,打开实验工程,阅读 main()函数。
(3) 按F7 功能键编译并链接工程。
(4) 按Ctrl+F5键或单击调试按钮,进入集成调试环境。
(5)按F5功能键全速执行。查看执行代码后LED1~LED4知识灯的变化情况。在没有任何操作时,与跑马灯效果已有,4个LED闪光二极管依次发光
(6)分别按KEY1、KEY2、KEY3和KEY4键 ,观察LED1、LED2、LED3、LED4显示情况
连接图如下所示
(7)添加代码时每按一下按键时均有一声响声
退出调试环境,返回编辑模式,添加代码,完成在按键时让蜂鸣器响一声。需要短接JP12,将PC0与蜂鸣器控制电路相连。
添加的代码为
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOA, &GPIO_InitStructure); /*初始化GPIOC端口推挽输出,50MHz*/
GPIO_ResetBits(GPIOC, GPIO_Pin_0); //PC0=0,此时蜂鸣器不响
新建一个Beep()函数,功能是响一声,代码如下
void Beep(void)
{
GPIO_SetBits(GPIOC, GPIO_Pin_0);
Delayms(n);
GPIO_ResetBits(GPIOC, GPIO_Pin_0);
}
在main()中修改
int main(void)
{
u8 KEY = 0;
u8 i = 0;
u16 Pinx[4] = {
GPIO_Pin_2, GPIO_Pin_3, GPIO_Pin_4, GPIO_Pin_7};
SystemInit(); /* 系统初始化 */
GPIO_KEYLED_Init(); /* GPIO初始化 */
while (1)
{
if (GPIO_ReadInputDataBit(GPIOD, GPIO_Pin_11) == 0)
{
KEY = 1;
Beep();
}
else
{
if (GPIO_ReadInputDataBit(GPIOD, GPIO_Pin_12) == 0)
{
KEY = 2;
Beep();
}
else
{
if (GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_13) == 0)
{
KEY = 3;
Beep();
}
if (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == 0)
{
KEY = 4;
Beep();
}
}
}
if (KEY == 0)
{
GPIO_ResetBits(GPIOD, Pinx[i]); /* LEDi+1亮 */
Delayms(n); /* 延时n ms */
GPIO_SetBits(GPIOD, Pinx[i]); /* LEDi+1灭 */
Delayms(n);
i++;
if (i >= 4)
i = 0;
}
else
{
GPIO_ResetBits(GPIOD, Pinx[KEY - 1]);
/* LED[KEY-1]亮 */
Delayms(n); /* 延时n ms */
GPIO_SetBits(GPIOD, Pinx[KEY - 1]);
/* LED[KEY-1]灭 */
Delayms(n);
}
}
}
(8)按F7键编译并链接,然后排除所有错误,最后编译链接
(9)按CTRL+F5进入调试环境
(10)按F5功能键运行程序,查看跑马灯显示是否正确,不正确的话修改代码,继续调试到正确为止。
(11)除了初始化程序外,将上述采用固件库函数操作代码修改为寄存器操作的代码
添加的代码为
GPIOD->ODR &= ~(1<<2) //让蜂鸣器不响
GPIOD->ODR |= (1<<2) //让蜂鸣器响
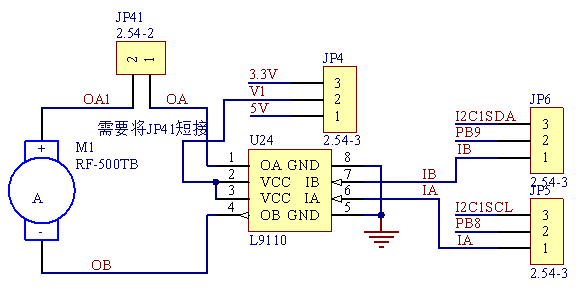
3.3 基于GPIO的直流电机控制实验
3.3.1 实验内容
在没有按键按下时,让双色灯灭;当KEY1按下时,双色灯LED7发红光,且电机正转;当KEY2按下时双色灯LED7发绿光,且电机反转;当KEY3按下时LED7灭,电机停止运转。
3.3.2 实验步骤
(1)连接 +5V电源到开发板,将ST-LINK仿真器连接到WEEEDK嵌入式系统实验开发板的JTAG插座上,USB插头连接到PC的USB插口;
(2)复制”GPIO-MOTO”文件夹的所有内容到D盘,双击…\Project\Project.uvprojx实验工程文件,打开实验工程,找到main()函数。
(3)按F7功能键编译并链接工程。
(4)按Ctrl+F5 键或单击调试按钮,进入集成调试环境。使用F10功能键单步调试、Ctrl+F10执行到光标处、F5功能键全力执行。在全速运行时,要观察LED7和电机运行情况。
(5)分别按KEY1、KEY2、KEY3,观察LED7和电机运行情况。
按KEY1:
按KEY2:

按KEY3: LED7熄灭,电机不转。
(6)返回编辑模式,修改或添加代码,完成由PE14和PE15分别控制电机的正转和反转。
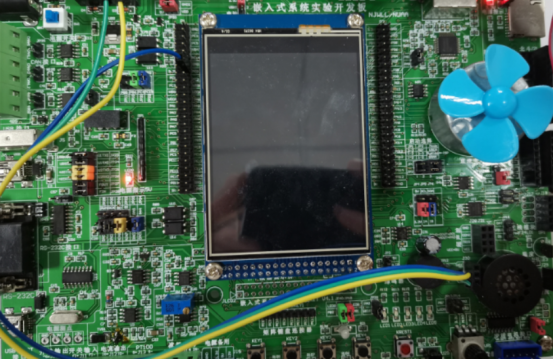
拔下JP5、JP6,并用杜邦线将P1中的PE14连接到JP5-3脚,让PE15连接到JP6-3脚,让PE14连接到IA,让PE15连接到IB。

修改GPIO初始化程序GPIO_MOTO_Init()
#define IA(x) ((x) ? (GPIO_SetBits(GPIOB, GPIO_Pin_14)) : (GPIO_ResetBits(GPIOB, GPIO_Pin_14)))
#define IB(x) ((x) ? (GPIO_SetBits(GPIOB, GPIO_Pin_15)) : (GPIO_ResetBits(GPIOB, GPIO_Pin_15)))
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14|GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure); /*初始化GPIOE端口PB14=IA,PB15=IB 50MHz推挽输出*/
(7)按F7编译并链接,然后排除所有错误,最后编译链接。
(8)按Ctrl+F5进入调试环境。
(9)按F5功能键运行程序,查看程序运行是否正确。如果不正确,就修改代码,继续调试,直到正确为止。
四、实验结果分析及体会
4.1 基于GPIO的LED跑马灯实验实验结果
通过添加代码成功实现让LED1、LED2、LED3、LED4、LED5轮流闪光,分别使用固件库函数方法,寄存器操作方法,以及汇编语言方法。具体的代码部分请参照上一节中的内容。
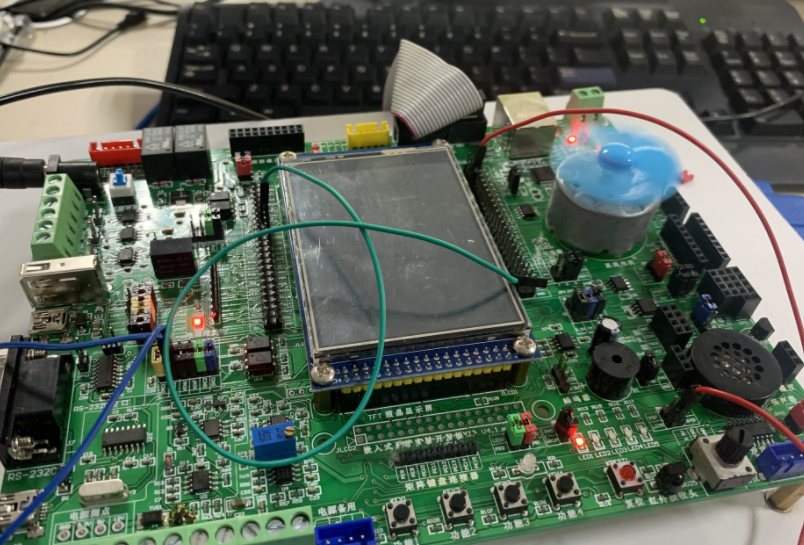
实验结果图片:

4.2 基于GPIO的简单人机交互接口实验
通过添加代码成功实现按下任意键,蜂鸣器均响一声,分别使用了固件库函数方法,寄存器操作方法。具体的代码部分请参照上一节中的内容。
实验结果图片:
4.3 基于GPIO的直流电机控制实验
这次实验成功实现了当KEY1按下时LED7发红光、电机正转,当KEY2按下时LED7发绿光、电机反转,当KEY2按下时,LED7灭、电机停止;修改GPIO初始化程序和相关程序、改变硬件的连接后也能得到相同的结果,达到了预期的实验效果。
4.4 实验体会
五、自我评价成绩(说明理由,等级为优、良、中、及格和不及格)
智能推荐
Android Studio 基础 之 截图,指定截图区域动态截图_android studio 截图-程序员宅基地
文章浏览阅读4.5k次,点赞5次,收藏33次。Android Studio 基础 之 截图,指定截图区域动态截图目录Android Studio 基础 之 截图,指定截图区域动态截图一、简单介绍二、实现原理三、注意事项四、预览效果五、实现步骤六、关键代码7、附录简版截图下面是简单的只要 x, y, width,heigth 输入进行屏幕截图的代码(也是从上面代码截取出来的,方便后期封装为工具类)一、简单介绍Android 开发中的一些基础操作,使用整理,便于后期使用。本节介绍,在Android中,_android studio 截图
android的底层驱动调试心得_cat /d/gpio-程序员宅基地
文章浏览阅读3.5k次,点赞3次,收藏23次。1、安卓模拟器使用sudo snap install scrcpy_302.snap --dangerousscrcpy抓取gpio的状态cat sys/kernel/debug/gpio2、调试背光ifconfig -a 查看wifi是否起来fdb111c89802e2bd78ebacaedac8e56ab12704ce lams0c7ba9436091827cc233b197c1432f4af8b0f1fe cq#sudo upgrade_tool di -b boot.img_cat /d/gpio
iOS 导航条 知识简析(返回按钮,标题,背景颜色 等)_返回按钮一般是什么颜色-程序员宅基地
文章浏览阅读2.4k次。一:导航条的返回按钮在讲导航条的返回按钮之前,先分享一个发现: 导航条自带 pop手势滑动功能,如果你没有自定义“返回”按钮,则可以直接手势滑动。栗子:页面A push到页面 B, B要pop回到A,在没有自定义返回按钮的情况下,可以直接点击导航条的Back按钮,也可以讲手指放在屏幕左边,向右滑动屏幕,即可pop回A。注:如果自定义了导航条的返回按钮,则滑动功能消失_返回按钮一般是什么颜色
技巧收集-程序员宅基地
文章浏览阅读762次。判断用户是否中止并离开了RESPONSE.ISCLIENTCONNECTED
盒子边框、外边距、内边距以及浮动设置_dorder-程序员宅基地
文章浏览阅读1.7k次。1.浮动设置 float:浮动方向 right右浮动 left左浮动。 2.边框设置 dorder:宽度 样式 颜色 ,其中边框实线为solid,虚线为dotted。3.外边距设置 margin:距离 1-4个值都可以,顺时针赋值,或者 margin..._dorder
SVD矩阵分解_svd分解-程序员宅基地
文章浏览阅读2.5k次。SVD矩阵在信息科学中的应用_svd分解
随便推点
操作系统精选习题——第四章_系统抖动现象的发生由什么引起的-程序员宅基地
文章浏览阅读3.4k次,点赞3次,收藏29次。一.单选题二.填空题三.判断题一.单选题静态链接是在( )进行的。A、编译某段程序时B、装入某段程序时C、紧凑时D、装入程序之前Pentium处理器(32位)最大可寻址的虚拟存储器地址空间为( )。A、由内存的容量而定B、4GC、2GD、1G分页系统中,主存分配的单位是( )。A、字节B、物理块C、作业D、段在段页式存储管理中,当执行一段程序时,至少访问()次内存。A、1B、2C、3D、4在分段管理中,( )。A、以段为单位分配,每._系统抖动现象的发生由什么引起的
UG NX 12零件工程图基础_ug-nx工程图-程序员宅基地
文章浏览阅读2.4k次。在实际的工作生产中,零件的加工制造一般都需要二维工程图来辅助设计。UG NX 的工程图主要是为了满足二维出图需要。在绘制工程图时,需要先确定所绘制图形要表达的内容,然后根据需要并按照视图的选择原则,绘制工程图的主视图、其他视图以及某些特殊视图,最后标注图形的尺寸、技术说明等信息,即可完成工程图的绘制。1.视图选择原则工程图合理的表达方案要综合运用各种表达方法,清晰完整地表达出零件的结构形状,并便于看图。确定工程图表达方案的一般步骤如下:口分析零件结构形状由于零件的结构形状以及加工位置或工作位置的不._ug-nx工程图
智能制造数字化工厂智慧供应链大数据解决方案(PPT)-程序员宅基地
文章浏览阅读920次,点赞29次,收藏18次。原文《智能制造数字化工厂智慧供应链大数据解决方案》PPT格式主要从智能制造数字化工厂智慧供应链大数据解决方案框架图、销量预测+S&OP大数据解决方案、计划统筹大数据解决方案、订单履约大数据解决方案、库存周转大数据解决方案、采购及供应商管理大数据模块、智慧工厂大数据解决方案、设备管理大数据解决方案、质量管理大数据解决方案、仓储物流与网络优化大数据解决方案、供应链决策分析大数据解决方案进行建设。适用于售前项目汇报、项目规划、领导汇报。
网络编程socket accept函数的理解_当在函数 'main' 中调用 'open_socket_accept'时.line: 8. con-程序员宅基地
文章浏览阅读2w次,点赞38次,收藏102次。在服务器端,socket()返回的套接字用于监听(listen)和接受(accept)客户端的连接请求。这个套接字不能用于与客户端之间发送和接收数据。 accept()接受一个客户端的连接请求,并返回一个新的套接字。所谓“新的”就是说这个套接字与socket()返回的用于监听和接受客户端的连接请求的套接字不是同一个套接字。与本次接受的客户端的通信是通过在这个新的套接字上发送和接收数_当在函数 'main' 中调用 'open_socket_accept'时.line: 8. connection request fa
C#对象销毁_c# 销毁对象及其所有引用-程序员宅基地
文章浏览阅读4.3k次。对象销毁对象销毁的标准语法Close和Stop何时销毁对象销毁对象时清除字段对象销毁的标准语法Framework在销毁对象的逻辑方面遵循一套规则,这些规则并不限用于.NET Framework或C#语言;这些规则的目的是定义一套便于使用的协议。这些协议如下:一旦销毁,对象不可恢复。对象不能被再次激活,调用对象的方法或者属性抛出ObjectDisposedException异常重复地调用对象的Disposal方法会导致错误如果一个可销毁对象x 包含或包装或处理另外一个可销毁对象y,那么x的Disp_c# 销毁对象及其所有引用
笔记-中项/高项学习期间的错题笔记1_大型设备可靠性测试可否拆解为几个部分进行测试-程序员宅基地
文章浏览阅读1.1w次。这是记录,在中项、高项过程中的错题笔记;https://www.zenwu.site/post/2b6d.html1. 信息系统的规划工具在制订计划时,可以利用PERT图和甘特图;访谈时,可以应用各种调查表和调查提纲;在确定各部门、各层管理人员的需求,梳理流程时,可以采用会谈和正式会议的方法。为把企业组织结构与企业过程联系起来,说明每个过程与组织的联系,指出过程决策人,可以采用建立过程/组织(Process/Organization,P/O)矩阵的方法。例如,一个简单的P/O矩阵示例,其中._大型设备可靠性测试可否拆解为几个部分进行测试