Un*、Id分别突变情况下单闭环直流调速系统仿真_怎样将有静差仿真图改为无静差-程序员宅基地
技术标签: matlab simulink 直流电机调速MATLAB SIMULINK仿真
1 有静差的比例调速系统的理论分析
首先分析有静差的比例调速系统,图1所示是具有转速负反馈的直流比例调速系统,被调量是转速n,给定量是转速给定电压Un*,在电动机轴上安装测速发电机TG (Tachometer Generator)用以得到与被测转速成正比的反馈电压Un。Un*与Un相比较后,得转速偏差电压△U,经过比例放大器A,产生电力电子变换器UPE所需的控制电压Uc,UPE是相控整流器或者PWM变换器。在调速系统中,比例放大器又称作比例(P)调节器。从Uc开始一直到直流电动机,系统的结构与开环调速系统相同,而闭环控制系统和开环控制系统的主要差别就在于转速n经过测量反馈到输入端参与控制。

图1 带转速负反馈的闭环直流比例调速系统原理框图
Fig.1 Schematic of the closed-loop DC proportional speed control system with negative speed feedback
他励直流电动机以磁场为媒介,实现电能到机械能的转换,其动态数学模型包括电压平衡方程和机械运动方程。其在额定励磁下的等效电路如图2所示,其中电枢回路总电阻R和电感L包含电力电子变换器内阻、电枢电阻和电感以及可能在主电路中接人的其他电阻和电感,规定的正方向如图2所示。

图2 他励直流电动机在额定励磁下的等效电路
Fig.2 His recitation DC motor is an equivalent circuit under rated excitation
分析该电路的动态电压方程、电动机轴上的动力学方程,得到该电路的动态结构图如图3所示。

图3 额定励磁下直流电动机的动态结构框图
Fig.3 Dynamic structure block diagram of a DC motor rated for excitation
由图3可以看出,直流电动机有两个输入量,一个是施加在电枢上的理想空载电压Un,另一个是负载电流Id。前者是控制输人量,后者是扰动输人量。如果不需要在结构图中显现出电流Id,可将扰动量IdL的综合点移前,再进行等效变换,得到图4。

图4 直流电动机动态结构框图的变换
Fig.4 Transformation of the dynamic structure block diagram of DC motors
在图1的转速反馈控制直流调速系统中还有比例放大器和测速反馈环节,它们的响应都可以认为是瞬时的,因此它们的传递函数就是它们的放大系数,即
放大器
![]()
测速反馈
![]()
知道了各环节的传递函数后,把它们按在系统中的相互关系组合起来,就可以画出闭环直流调速系统的动态结构框图,如图5所示。由图可见,将电力电子变换器按一阶惯性环节处理后,带比例放大器的转速反馈控制直流调速系统可以近似看作是一个三阶线性系统。

图5 转速反馈控制直流调速系统的动态结构框图
Fig.5 Dynamic structure block diagram of the DC speed control system with speed feedback control
2 无静差的比例积分调速系统的理论分析
与有静差的比例调速系统相比,无静差的比例积分调速系统只需将比例放大器换成转速调节器( Automatic Speed Regulator, ASR)即可,其他部分均与有静差的比例调速系统相同,图6所示是具有转速负反馈的直流调速比例积分系统。

图6 带转速负反馈的闭环直流比例积分调速系统原理图
Fig.6 Closed-loop DC proportional integration speed control system schematic with negative speed feedback
接下来主要介绍ASR模块部分,采用模拟控制时,可用运算放大器来实现PI调节器,其电路图如图7所示。图中所示的极性表明调节器输人Uin的极性和输出Uex。的极性是反相的; Rbal为运算放大器同相输人端的平衡电阻,一般取反相输人端各电路电阻的并联值,该电路的传递函数为:
![]()
式中,Kp为PI调节器的比例放大系数;τ为PI调节器的积分时间常数。
无静差直流调速系统的稳态结构如图7所示,图中的转速调节器采用比例积分调节器,用象征性的比例积分特性来表示。

图7无静差直流调速系统稳态结构框图
Fig.7 A block diagram of a steady-state structure without static DC speed-regulating system
3 有静差的比例调速系统实验仿真参数及其仿真结果
3.1 实验仿真参数
直流电动机:反电动势系数 Ce=0. 145 9V * min/r,允许过载倍数l =1.5; PWM变换器开关频率: 8kHz, 放大系数Ks=107.5,Ts =0.002s;电枢回路总电阻R=0.368Ω;时间常数:电枢回路电磁时间常T1 =0. 0144s,电力拖动系统机电时间常数Tm=0.18s;转速反馈系数a=0.003 83V*min/r;对应额定转速时的给定电压Un* = 10V;比例放大器的放大系数为:Kp=1。
为了实现突变输入量,我选择了两个阶跃信号输入,第一个的波形图如图8所示。横坐标为时间(s),纵坐标为输入控制量Un*(V),该输入控制量在第1秒时刻阶跃到10V。
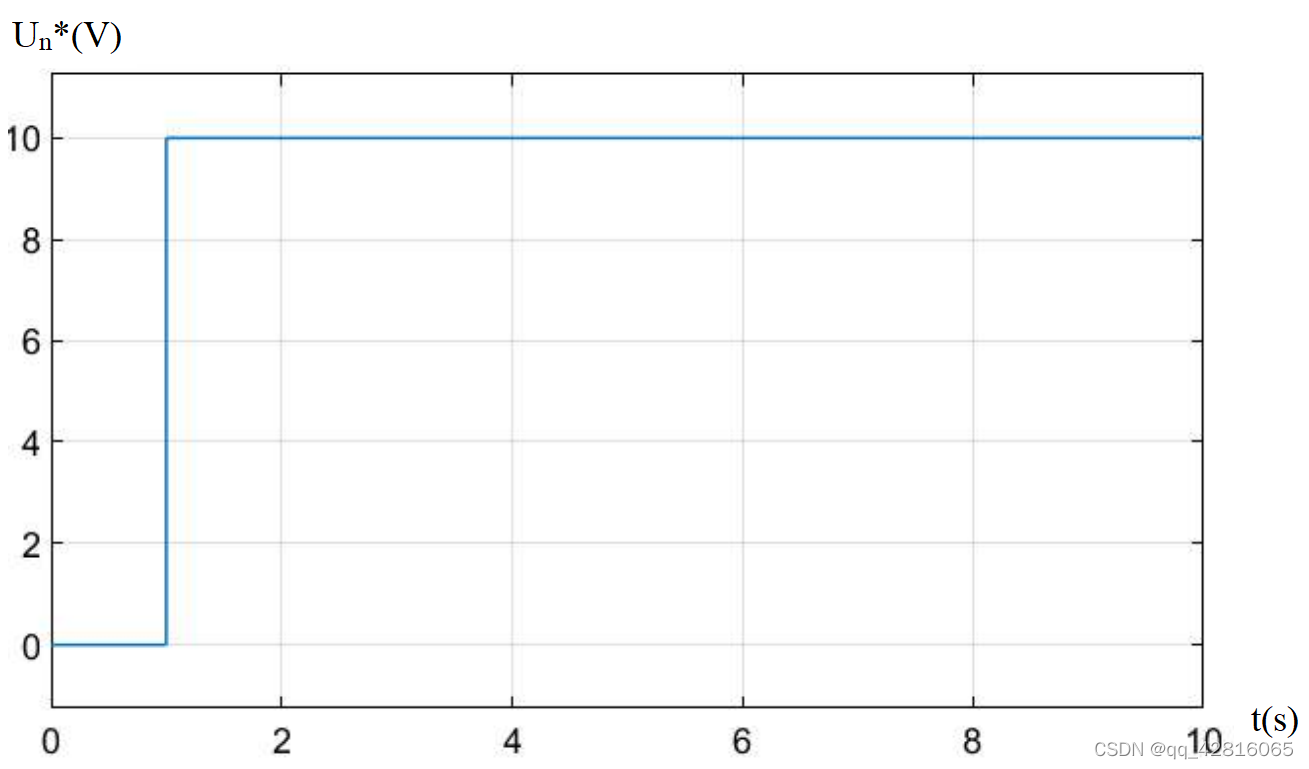
图8 一号控制输入量波形图
Fig.8 No.1 controls the input waveform chart
第二个的波形图如图9所示。横坐标为时间(s),纵坐标为输入控制量Un*(V),该输入控制量在第2秒时刻阶跃到2V。

图9二号控制输入量波形图
Fig.9 No.2 controls the input waveform chart
两个波形进行叠加得到完整的控制输入量的突变波形图如图10所示。

图10 实际控制输入量波形图
Fig.10 The actual control input waveform chart
为了实现突变负载,我采用了类似的方法选择了两个阶跃信号,第一个的电流波形图如图11所示。坐标为时间(s),纵坐标为负载电流IdL(A),该负载电流在第1秒时刻阶跃到1A。

图11 一号负载电流波形图
Fig.11 Load No. 1 current waveform
第二个的波形图如图12所示。横坐标为时间(s),纵坐标为负载电流IdL(A),该负载电流在第2秒时刻阶跃到40A。

图12 二号负载电流波形图
Fig.12 Load No. 2 current waveform
两个波形进行叠加得到完整的负载电流的突变波形图如图13所示。

图13 实际负载电流波形图
Fig.13 Actual load current waveform
3.2 实验仿真结果
3.2.1 突加控制输入量仿真实验
该实验的具体步骤如下:
1.打开MATLAB中的Simulink;
2.创建一个Blank Model;
3.然后在Library Browser中添加以下模块:Step、Add、Sum、Gain、Transfer Fcn、Scope;
4.并将所有模块进行排版连线得到图14所示的有静差的比例调速系统的仿真框图;

图14 有静差的比例调速系统的仿真框图
Fig.14 Simulation block diagram of a proportional speed control system with static difference
5.修改模块参数:
Un*1:Final Value改为10;
Un*2:Step Time改为2,Final Value改为2;
Kp1、Id1:不做修改;
Ks/(Ts*s+1)1:Numerator coefficients修改为[107.5],Denominator coefficients修改为[0.0020 1];
1/R/(T1*s+1)1:Numerator coefficients修改为[1/0.368],Denominator coefficients修改为[0.0144 1];
R/Tm*s1:Numerator coefficients修改为[0.368],Denominator coefficients修改为[0.18 0];
1/Ce1:Gain修改为1/0.1459;
a1:Gain修改为0.00383;
6.双击打开Scope,点击运行按钮,进行仿真,获得图15所示的动态过程仿真结果。

图15 突加控制输入量的动态过程仿真结果图
Fig.15 Graph of dynamic process simulation results that suddenly controls the input
3.2.2 突加负载仿真实验
该实验的具体步骤如下:
1.打开MATLAB中的Simulink;
2.创建一个Blank Model;
3.然后在Library Browser中添加以下模块:Step、Add、Sum、Gain、Transfer Fcn、Scope;
4.并将所有模块进行排版连线得到图16所示的有静差的比例调速系统的仿真框图;

图16 有静差的比例调速系统的仿真框图
Fig.16 Simulation block diagram of a proportional speed control system with static difference
5.修改模块参数:
Un*3:Final Value改为10;
Kp2、Id2:不做修改;
Ks/(Ts*s+1)2:Numerator coefficients修改为[107.5],Denominator coefficients修改为[0.0020 1];
1/R/(T1*s+1)2:Numerator coefficients修改为[1/0.368],Denominator coefficients修改为[0.0144 1];
Id3:Step time修改为2,Final value修改为10;
R/Tm*s2:Numerator coefficients修改为[0.368],Denominator coefficients修改为[0.18 0];
1/Ce2:Gain修改为1/0.1459;
a2:Gain修改为0.00383;
6.双击打开Scope,点击运行按钮,进行仿真,获得图17所示的动态过程仿真结果。
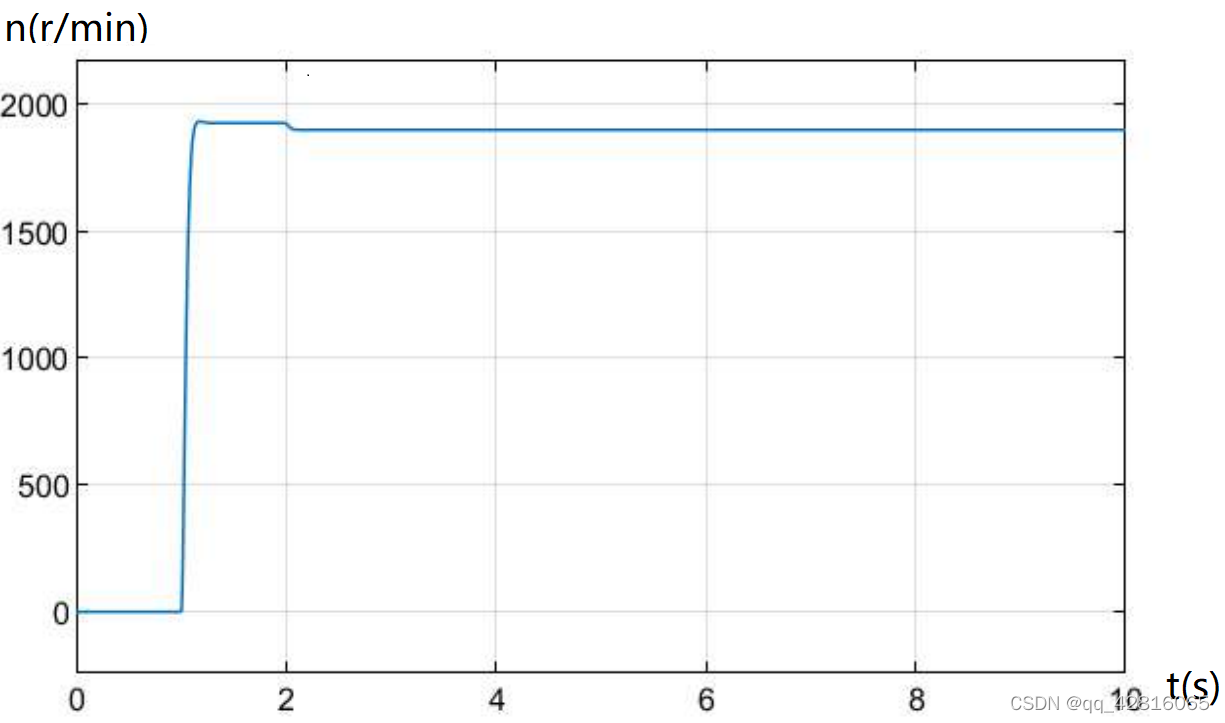
图17突加负载的动态过程仿真结果图
Fig.17 Graph of dynamic process simulation results for burst load
4 无静差的比例积分调速系统实验仿真参数及其仿真结果
4.1 实验仿真参数
直流电动机:反电动势系数 Ce=0. 145 9V * min/r,允许过载倍数l =1.5; PWM变换器开关频率: 8kHz, 放大系数Ks=107.5,Ts =0.002s;电枢回路总电阻R=0.368Ω;时间常数:电枢回路电磁时间常T1 =0. 0144s,电力拖动系统机电时间常数Tm=0.18s;转速反馈系数a=0.003 83V*min/r;对应额定转速时的给定电压Un* = 10V;比例放大器的放大系数为:Kp=1;比例积分调节器:比例放大系数Kp =21,积分时间常数t =0.088s。
为了实现突变输入量,我选择了两个阶跃信号输入,第一个的波形图如图18所示。横坐标为时间(s),纵坐标为输入控制量Un*(V),该输入控制量在第1秒时刻阶跃到10V。

图18 一号控制输入量波形图
Fig.18 No.1 controls the input waveform chart
第二个的波形图如图19所示。横坐标为时间(s),纵坐标为输入控制量Un*(V),该输入控制量在第2秒时刻阶跃到2V。

图19 二号控制输入量波形图
Fig.19 No.2 controls the input waveform chart
两个波形进行叠加得到完整的控制输入量的突变波形图如图20所示。

图20实际控制输入量波形图
Fig.20 The actual control input waveform chart
为了实现突变负载,我采用了类似的方法选择了两个阶跃信号,第一个的电流波形图如图21所示。坐标为时间(s),纵坐标为负载电流IdL(A),该负载电流在第1秒时刻阶跃到1A。

图21 一号负载电流波形图
Fig.21 Load No. 1 current waveform
第二个的波形图如图22所示。横坐标为时间(s),纵坐标为负载电流IdL(A),该负载电流在第2秒时刻阶跃到150A。

图22 二号负载电流波形图
Fig.22 Load No. 2 current waveform
两个波形进行叠加得到完整的负载电流的突变波形图如图23所示。

图23 实际负载电流波形图
Fig.23 Actual load current waveform
3.2 实验仿真结果
3.2.1 突加控制输入量仿真实验
该实验的具体步骤如下:
1.打开MATLAB中的Simulink;
2.创建一个Blank Model;
3.然后在Library Browser中添加以下模块:Step、Add、Sum、Gain、Transfer Fcn、Scope;
4.并将所有模块进行排版连线得到图14所示的有静差的比例调速系统的仿真框图;
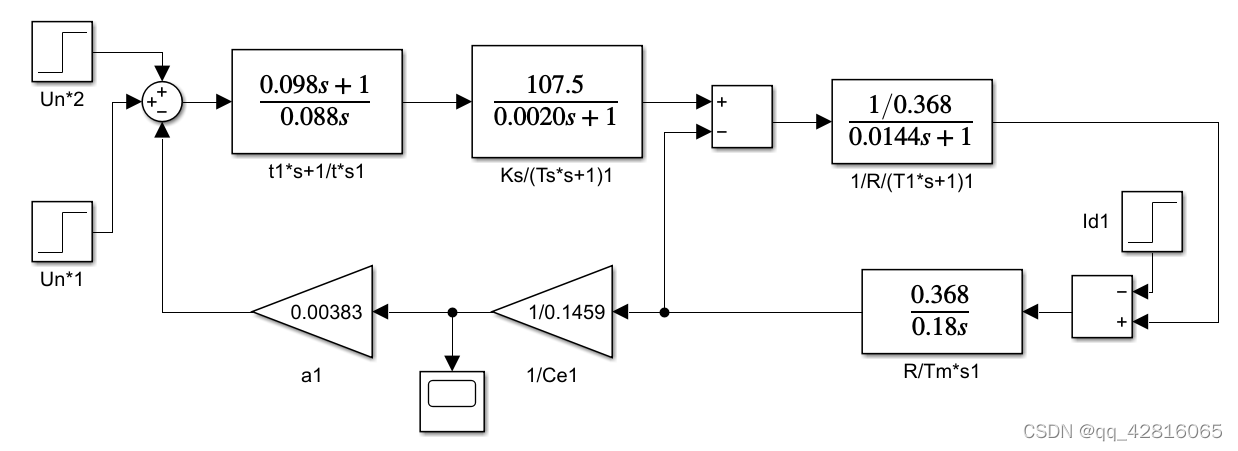
图24 无静差的比例积分调速系统的仿真框图
Fig.24 Simulation block diagram of a proportional integration speed control system without static difference
5.修改模块参数:
Un*1:Final Value改为10;
Un*2:Step Time改为2,Final Value改为2;
t1*s+1/t*s1:Numerator coefficients修改为[0.098 1],Denominator coefficients修改为[0.088 0];
Id1:不做修改;
Ks/(Ts*s+1)1:Numerator coefficients修改为[107.5],Denominator coefficients修改为[0.0020 1];
1/R/(T1*s+1)1:Numerator coefficients修改为[1/0.368],Denominator coefficients修改为[0.0144 1];
R/Tm*s1:Numerator coefficients修改为[0.368],Denominator coefficients修改为[0.18 0];
1/Ce1:Gain修改为1/0.1459;
a1:Gain修改为0.00383;
6.双击打开Scope,点击运行按钮,进行仿真,获得图25所示的动态过程仿真结果。

图27 突加负载的动态过程仿真结果图
Fig.27 Graph of dynamic process simulation results for burst load
4 结论
有静差的比例调速系统在遇到控制输入量突变时,系统能在毫秒级反应并调节到指定的转速。在调节过程中,转速没有出现超调量;当遇到负载突变时,系统能在毫秒级反应,但最终调整到的转速低于目标值,在调节过程中,转速没有出现超调量,此时系统出现的静差,分析该系统的机械特性得知是由电枢回路总电阻引起的。
无静差的比例积分调速系统在遇到控制输入量突变时,系统能在毫秒级反应并调节到指定的转速。在调节过程中,转速有出现超调量。同时调节的速度比有静差的比例调速系统慢,这是由加入积分环节导致调节时间的增长;当遇到负载突变时,系统能在毫秒级反应,最终调整到的转速等于目标值,此时系统没有出现的静差,这是由于积分环节调节出来的结果。但调节的速度比有静差的比例调速系统慢,快速性略差。
参考文献
[1] 陈伯时. 电力拖动自动控制系统[M]. 北京:机械工业出版社,2003.
[2] 阮毅, 陈维钧. 运动控制系统. 北京:清华大学出版社, 2006.
[3] 刘白雁. 机电系统动态仿真 —基于matlab/simulink. 北京:机械工业出版社 2005.
智能推荐
react学习总结6--构建工具Gulp、Browserify(二)_react gulp-程序员宅基地
文章浏览阅读1k次。react 学习总结–构建工具Gulp、Browserify(二)1.html 文件处理gulp-htmlmin 插件 用于压缩html,可以进行配置,下边是配置信息(选填) var gulp = require('gulp'), htmlmin = require('gulp-htmlmin'); gulp.task('htmlmin', function ()_react gulp
开关电源输入:共模电感,X电容,Y电容,差摸电感理论计算!_共模电感和y电容在滤波方面的区别-程序员宅基地
文章浏览阅读7.6k次,点赞3次,收藏69次。转自:https://mp.weixin.qq.com/s/qp_DSBGKdjNo2-lO2s5v7Q引言在开关电源中,EMI滤波器对共模和差模传导噪声的抑制起着显著的作用。在研究滤波器原理的基础上,探讨了一种对共模、差模信号进行独立分析,分别建模的方法,最后基于此提出了一种EMI滤波器的设计程序。高频开关电源由于其在体积、重量、功率密度、效率等方面的诸多优点,已经被广泛地应用于工业..._共模电感和y电容在滤波方面的区别
IntelliJ IDEA 设置注释模板 (Mac)_mac idea 设置注解格式-程序员宅基地
文章浏览阅读7.9k次。类注释模板设置:点击 preferences ,搜索 File and Code Template ,在 Files tab 页下,选择 Class,在类名上面添加模板:/** * @program ${PROJECT_NAME} * @description: ${TODO} * @author: ${USER} * @create: ${YEAR}/${MONTH}/${DAY}..._mac idea 设置注解格式
sizeof用法 _sizeof(4.0+2)-程序员宅基地
文章浏览阅读2k次。Sizeof用法本文主要包括二个部分,第一部分重点介绍在VC中,怎么样采用sizeof来求结构的大小,以及容易出现的问题,并给出解决问题的方法,第二部分总结出VC中sizeof的主要用法。1、 sizeof应用在结构上的情况请看下面的结构:struct MyStruct{double dda1;char dda;int type};对结构MyStruct采用_sizeof(4.0+2)
阅读小结:Large-Margin Softmax Loss for Convolutional Neural Networks_large-margin softmax loss的代码-程序员宅基地
文章浏览阅读2.2k次,点赞3次,收藏4次。徐博最近一直在看我博客,肯定是想看我什么时候不更新,然后好嘲笑我。当然,不排除徐博已经爱上我的可能。What:改进SoftmaxLoss,显式的控制类内的距离,(不让 已经对的样本score太高,影响训练)可以防止过拟合。回顾SoftmaxLoss:1. Softmax 就是一个把一个向量归一的函数,输出也是向量。在matlab里就3行代码:% X_large-margin softmax loss的代码
后端java解析复杂嵌套json_java 解析复杂类型的json-程序员宅基地
文章浏览阅读6.2k次。其实不是很复杂百度翻译传过来的json数据:{"from":"zh","to":"en","trans_result":[{"src":"高度600米","dst":"Height 600 meters"}]}现在要取出dst对应的值:Height 600 meters String date="{"from":"zh","to":"en","trans_result":[_java 解析复杂类型的json
随便推点
如何高效地从BAM文件中提取fastq-程序员宅基地
文章浏览阅读1.8k次。在一年前,我写过一篇文章,叫做如何从BAM文件中提取fastq,之前也发现了从BAM里面提取Fastq是有些麻烦,只不过最后通过samtools的子命令实现了数据提取,实现功能之后也没有再去思考如何提高效率。最近读到每周文献-190419-植物单细胞BAM重比对以及假基因研究时,发现里面提到了一个工具叫做 bazam, 功能就是提取Fastq文件,文章发表在 Genome Bio..._10x 开发的工具 bamtofastq
中国电信天翼宽带无线路由器设置wifi笔记_中国电信wifi设置时间-程序员宅基地
文章浏览阅读8k次。0x00 前言 还记得电信天翼宽带吗?现在的天翼宽带的终端基本是华为的无限路由了,相信有不少同学在包装了中国电信天翼宽带后,个人申请到一个账号/密码,并且额外缴费得到一个路由器,然后就没有然后了。心里就纳闷,咋上wifi,然后又得另外花钱买个无线路由,然后不知道怎样弄。0x01 电信宽带的路由终端首先电信的华为路由器的底部都会贴有该终端的信息,例如终端登录地址,账号,密码等_中国电信wifi设置时间
让VC编译出来的程序不依赖于msvcr80.dll/msvcr90.dll/msvcr100.dll等文件_编译msvc不依赖msvcr100.dll-程序员宅基地
文章浏览阅读853次。让VC编译出来的程序不依赖于msvcr80.dll/msvcr90.dll/msvcr100.dll等文件正常情况下,当我们用VC编译出一个Console/Win32类型项目的exe程序时(这里暂不考虑MFC程序),会依赖于msvcrxx.dll文件(xx为不同VC对应的版本号,VC2005为80,VC2008为90,VC2010为100),发布程序的时候,就需要把对应的dll也cop_编译msvc不依赖msvcr100.dll
什么是问题?_问题是什么-程序员宅基地
文章浏览阅读4.6k次。今天看到一篇文章,说什么是问题?看到这个标题很好奇。就点进去看了一下。以下是总结和思考。漫漫人生中,我们总会遇到各种各样的问题。那么什么是问题呢?有以下一个定义:问题是目标与现状的差异。解决方案,就是现状到目标的路径。那么,什么是目标呢?目标应该是符合真实的需求。那么,什么是需求呢?需求不仅包含当前这个问题,有时候它更需要考虑到整个系统。打个比方说,有一天某个系统出现了超时问题,..._问题是什么
java中controller,service,serviceImpl,mapper,xml等几个文件的作用理解,以简单的查询为例_serviceimpl类的作用是什么-程序员宅基地
文章浏览阅读5.3w次,点赞59次,收藏278次。说明:最近一周都在写报表,样式很统一,上面是查询条件,下面是查询结果,页面如下图所示。由于要写很多报表,都是重复的工作,所以部门里的小哥哥在写了一个基于node的小程序,直接配置JSON文件,就可以生成报表模板,感觉很强(后面想学习一下)。作为一个优秀的CV工程师(复制粘贴),我也没怎么写前端的工作,直接用生成的模板就好了,但是后台的查询我还是稍微走心的。由于JAVA基础不是很好,总结的可..._serviceimpl类的作用是什么
java开发注释规范,开发人员代码注释规范.doc-程序员宅基地
文章浏览阅读111次。开发人员代码注释规范开发人员代码注释规范Java类版权及代码注释注释示例package java.blah;import java.blah.blahdy.BlahBlah;/** ==========================================================* Version Author Date Des..._huangzhihui java