IMU姿态融合(MPU9250从校正到滤波步骤)_mpu9250熔丝模式-程序员宅基地
联系方式:[email protected]
一、动机
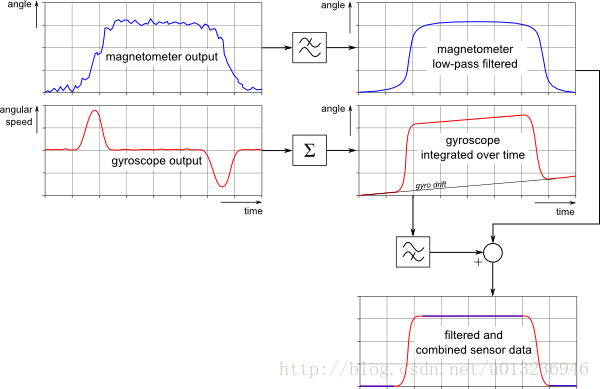
MPU9250包括三轴加速度计、三轴陀螺仪和三轴磁力计。因为加速度/磁力计具有高频噪声(需要低通滤波),将加速度/磁力计的信号看成是音频信号,它们的信号会有很多“毛刺“,也就是说它们的瞬时值不够精确,解算出来的姿态会震荡,但长期来看姿态方向是对的。而陀螺仪具有低频噪声(需要高通滤波),即每个时刻的得到的角速度是比较精确的,使用积分就能得到旋转角度(姿态),但是积分会累积误差,因此积分到后面姿态就不对了,也就是漂移现象。 加速度/磁力计和陀螺仪在频域上的特性互补,可以融合这三种传感器的数据,提高精度和系统的动态特性。
下图表示的是把传感器翻转90°一段时间后又翻转回来时,加速度/磁力计、陀螺仪以及融合传感信号,所求得的姿态信息:
然而对于原始的MPU9250来说,在进行姿态融合前需要对传感器进行校正等“预处理”。
二、步骤
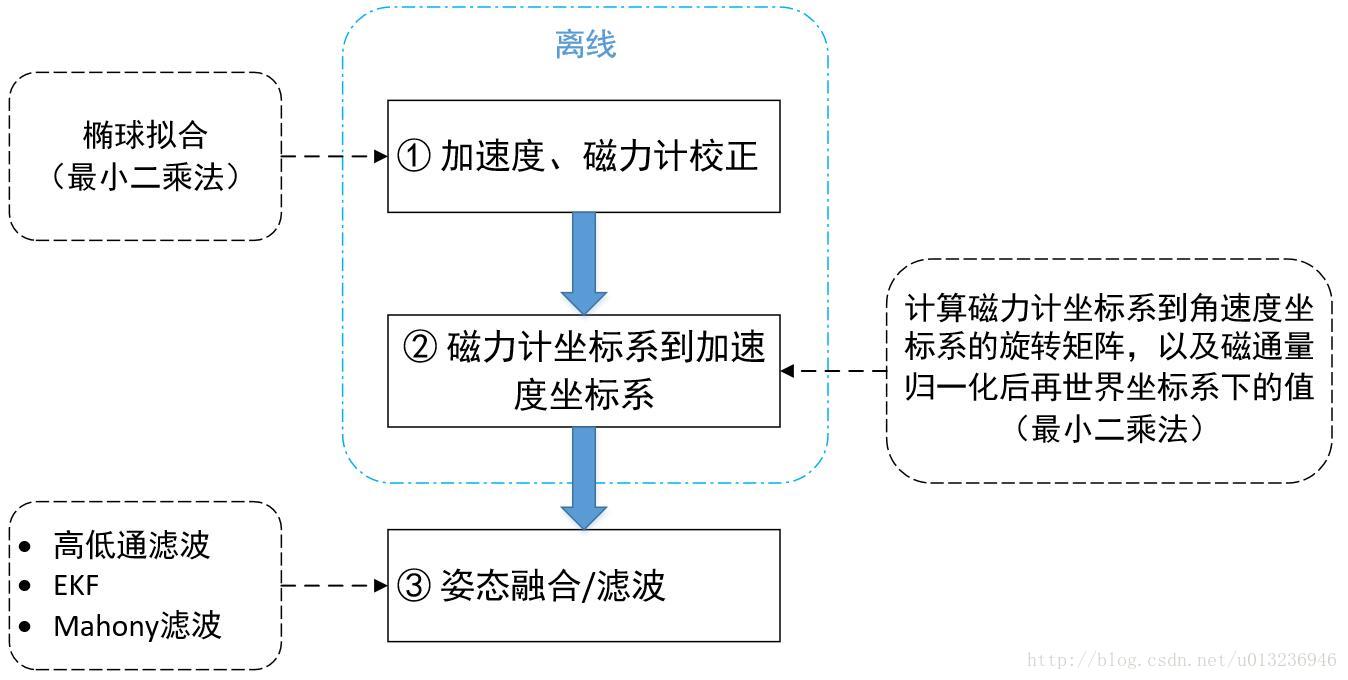
如上图所示,要对MPU9250进行姿态融合/滤波,大体需要三个步骤:1、校正,2、坐标转换,3、滤波。其中前两步需要离线执行。下面详解这三个步骤。
1. 传感器校正
按正常的情况来说,加速度传感器在静止状态(即只受重力作用),重力在各个姿态下,在三维空间中,向量顶点会落在一个球面上。但在IMU中,x,y,z轴的度量单位很大可能不相同,假设各轴之间相互直,各姿态重力点会落在一个椭球面上,椭球的中心也不一定在原点,这其实就是加速度的偏移量。
在磁力计上,由于测量磁场强度,在环境不变的情况下,传感器每个姿态感受磁场强度是相同的,所以不需要静止状态,磁力计测量的x,y,z轴值,在没有偏差且传感器内部x,y,z轴相互垂直的情况下,在三维空间中组成一个圆球面。但是磁力计存在Hard Iron Distortion和Soft Iron Distortion,使得x,y,z轴度量单位不相同,各轴也并非相互垂直,椭球球心也并非[0,0,0]坐标。
总的来说加速度/磁力计校正,需要求出椭球的球心(偏移量)、椭球轴长(各轴单位长度;其实磁力计不需要求,后面会解释。),即椭球拟合。
加速度计校正
- 在离线数据中寻找静止状态下的加速度传感器值,假设静止时的不同姿态共有 n 个,则得到数据
accData∈Rn×3 ; - accData∈Rn×3 作为样本数据,使用最小二乘法即可求出椭球方程的各个参数,接着根据我师兄博客的方法可以求出椭球的球心(偏移量)和轴长。
磁力计校正
- 提取离线数据的磁力计传感器的值(不需要静止状态),得到样本数据 magData∈Rm×3 , 假设有m组数据;
- magData∈Rm×3 作为样本数据,使用最小二乘法即可求出椭球方程的各个参数,进一步求出球心(偏移量)和轴长(轴长可忽略)。
陀螺仪校正
陀螺仪不存在椭球的问题,因此可以直接从离线数据中找到静止状态下的数据,对数据求均值即可得到偏移量。
2. 磁力计坐标系转换到加速度坐标系
磁力计的基坐标系和加速度的基坐标系(我们以加速度的基坐标系作为世界坐标系)并不一定是一样的,比如加速度的基坐标系x轴指向东,磁力计的指向北。因此,需要将磁力计坐标系转换到加速度计坐标系,才能通过加速度/磁力计解算出正确的姿态。
假设加速度计测量到的重力加速度向量是 ug ,磁力计测量到的磁通量是 vm ,首先要将 vm 从椭球上投射到正球上,投射方程为 rm=Avm 。 rm 是投射后的向量, A 为
其次求出 rm 转换到加速度计坐标系的旋转矩阵 R ,得到
椭球转换正球和旋转变换都已经包括在矩阵 B 里了,再次使用 最小二乘法求出
磁通量在世界坐标系下的x轴分量为0,重力加速度方向固定不变和z轴一致,通过向量点乘可以求出归一化后磁通量在世界坐标系下z轴的分量,再用模长公式求出y轴的分量。最后得到磁通量在世界坐标系下的向量 wm ,用于滤波时的校正。
3. 姿态融合
在使用各种滤波方法(如高低通滤波,EKF,Mahony)做姿态融合时,可以基于欧拉角、方向余弦和四元数等方法。欧拉角在求解姿态时存在奇点(万向节锁),不能用于全姿态解算;方向余弦可用于全姿态解算但计算量大,不能满足实时性要求;四元数,计算量小,无奇点,满足实时解算。
所以这里使用的是基于四元数姿态融合,滤波方法包括高低通滤波、EKF、Mahony滤波。下面简单介绍这三种算法的大致思想:
高低通滤波
两个方程说明问题
Quaternion 是姿态融合后的四元数, gyroSensorQ 是陀螺仪测量到的角速度所代表的瞬时四元数, Quaternion(t)^ 是使用陀螺仪推算 t 时刻的估计姿态,
EKF
广义卡尔曼滤波,主要有两步:估算、校正。(公式和推导不详述)。
- 估算:和高低通滤波一样,使用陀螺仪估算出 t 时刻四元数;
- 校正:计算出估算姿态下的重力加速度和磁通量向量,再用加速度/磁力计测量到的重力加速度和磁通量向量按照EKF校正方程进行校正。
Mahony滤波
主要是使用了PI控制器思想(未深入,理解有偏差欢迎指出)。同样也分两步:估算、校正。
- 估算:和前面一样,使用陀螺仪估算出
t 时刻四元数; - 校正:计算出估算姿态下的重力加速度和磁通量向量,再用加速度/磁力计测量到的重力加速度和磁通量向量叉乘估算姿态的计算结果,得到的是估算姿态与测量姿态的误差 e 。
e 可以对陀螺仪测量到的角速度进行补偿,使用的是PI控制进行补偿。其中P用于控制加速度计和陀螺仪之间的交叉频率,I用于校正陀螺仪误差。使用补偿后的角速度重新估算出 t 时刻四元数,此时已达到了滤波效果。
三、实验结果
加速度计椭球拟合
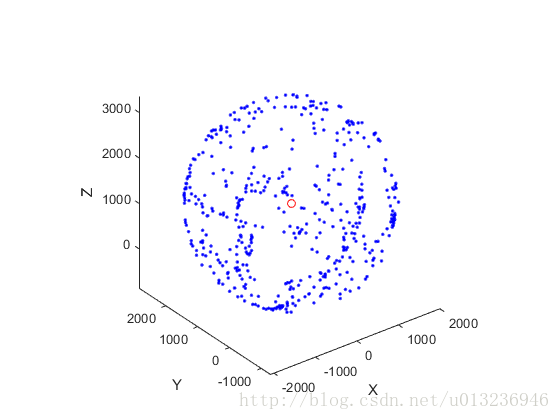
上图更像一个球,但球心明显偏离
磁力计椭球拟合
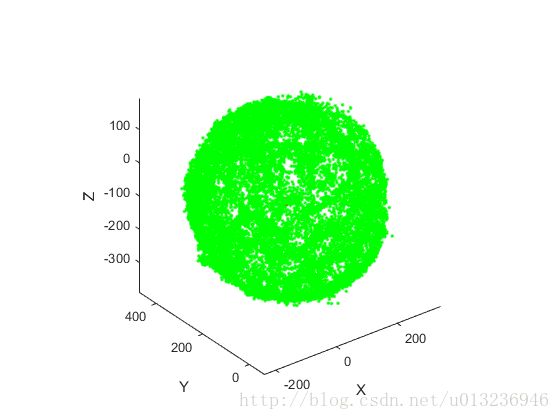
同样球心明显偏离 [0,0,0] 。
四元数姿态估计
下图中第一到第四行分别是四元数4个值在使用各种方法估计姿态时的变化情况,第五行是角速度的变化情况。

可以看到,除了Gyro估计的姿态,其他三种滤波算法估算的姿态基本一样。
Matlab实验视频:
height="500" width="800" src="http://player.youku.com/embed/XMjgxOTUzMDE0NA==">
前面两个图是加速度计和磁力计的椭球拟合;后一个图是各姿态融合算法对比,可以看到陀螺仪估算的姿态随时间累积误差变大,加速度/磁力计估算的姿态有明显的抖动(高频噪声),其他三种姿态融合算法效果差别不大。
计算时间 Mahony < 高低通 < EKF
手机端姿态融合
属于实验室张欣博士师兄的成果,非本人的工作。
height="500" width="800" src="http://player.youku.com/embed/XMjUxMDM5Mjk0MA==">
蓝牙传输的数据为100Hz
计算所用的时间 : Mahony < 高低通 < EKF
致谢:以上工作由张欣师兄指导完成,感谢师兄!
智能推荐
解决win10/win8/8.1 64位操作系统MT65xx preloader线刷驱动无法安装_mt65驱动-程序员宅基地
文章浏览阅读1.3w次。转载自 http://www.miui.com/thread-2003672-1-1.html 当手机在刷错包或者误修改删除系统文件后会出现无法开机或者是移动定制(联通合约机)版想刷标准版,这时就会用到线刷,首先就是安装线刷驱动。 在XP和win7上线刷是比较方便的,用那个驱动自动安装版,直接就可以安装好,完成线刷。不过现在也有好多机友换成了win8/8.1系统,再使用这个_mt65驱动
SonarQube简介及客户端集成_sonar的客户端区别-程序员宅基地
文章浏览阅读1k次。SonarQube是一个代码质量管理平台,可以扫描监测代码并给出质量评价及修改建议,通过插件机制支持25+中开发语言,可以很容易与gradle\maven\jenkins等工具进行集成,是非常流行的代码质量管控平台。通CheckStyle、findbugs等工具定位不同,SonarQube定位于平台,有完善的管理机制及强大的管理页面,并通过插件支持checkstyle及findbugs等既有的流..._sonar的客户端区别
元学习系列(六):神经图灵机详细分析_神经图灵机方法改进-程序员宅基地
文章浏览阅读3.4k次,点赞2次,收藏27次。神经图灵机是LSTM、GRU的改进版本,本质上依然包含一个外部记忆结构、可对记忆进行读写操作,主要针对读写操作进行了改进,或者说提出了一种新的读写操作思路。神经图灵机之所以叫这个名字是因为它通过深度学习模型模拟了图灵机,但是我觉得如果先去介绍图灵机的概念,就会搞得很混乱,所以这里主要从神经图灵机改进了LSTM的哪些方面入手进行讲解,同时,由于模型的结构比较复杂,为了让思路更清晰,这次也会分开几..._神经图灵机方法改进
【机器学习】机器学习模型迭代方法(Python)-程序员宅基地
文章浏览阅读2.8k次。一、模型迭代方法机器学习模型在实际应用的场景,通常要根据新增的数据下进行模型的迭代,常见的模型迭代方法有以下几种:1、全量数据重新训练一个模型,直接合并历史训练数据与新增的数据,模型直接离线学习全量数据,学习得到一个全新的模型。优缺点:这也是实际最为常见的模型迭代方式,通常模型效果也是最好的,但这样模型迭代比较耗时,资源耗费比较多,实时性较差,特别是在大数据场景更为困难;2、模型融合的方法,将旧模..._模型迭代
base64图片打成Zip包上传,以及服务端解压的简单实现_base64可以装换zip吗-程序员宅基地
文章浏览阅读2.3k次。1、前言上传图片一般采用异步上传的方式,但是异步上传带来不好的地方,就如果图片有改变或者删除,图片服务器端就会造成浪费。所以有时候就会和参数同步提交。笔者喜欢base64图片一起上传,但是图片过多时就会出现数据丢失等异常。因为tomcat的post请求默认是2M的长度限制。2、解决办法有两种:① 修改tomcat的servel.xml的配置文件,设置 maxPostSize=..._base64可以装换zip吗
Opencv自然场景文本识别系统(源码&教程)_opencv自然场景实时识别文字-程序员宅基地
文章浏览阅读1k次,点赞17次,收藏22次。Opencv自然场景文本识别系统(源码&教程)_opencv自然场景实时识别文字
随便推点
ESXi 快速复制虚拟机脚本_exsi6.7快速克隆centos-程序员宅基地
文章浏览阅读1.3k次。拷贝虚拟机文件时间比较长,因为虚拟机 flat 文件很大,所以要等。脚本完成后,以复制虚拟机文件夹。将以下脚本内容写入文件。_exsi6.7快速克隆centos
好友推荐—基于关系的java和spark代码实现_本关任务:使用 spark core 知识完成 " 好友推荐 " 的程序。-程序员宅基地
文章浏览阅读2k次。本文主要实现基于二度好友的推荐。数学公式参考于:http://blog.csdn.net/qq_14950717/article/details/52197565测试数据为自己随手画的关系图把图片整理成文本信息如下:a b c d e f yb c a f gc a b dd c a e h q re f h d af e a b gg h f bh e g i di j m n ..._本关任务:使用 spark core 知识完成 " 好友推荐 " 的程序。
南京大学-高级程序设计复习总结_南京大学高级程序设计-程序员宅基地
文章浏览阅读367次。南京大学高级程序设计期末复习总结,c++面向对象编程_南京大学高级程序设计
4.朴素贝叶斯分类器实现-matlab_朴素贝叶斯 matlab训练和测试输出-程序员宅基地
文章浏览阅读3.1k次,点赞2次,收藏12次。实现朴素贝叶斯分类器,并且根据李航《统计机器学习》第四章提供的数据训练与测试,结果与书中一致分别实现了朴素贝叶斯以及带有laplace平滑的朴素贝叶斯%书中例题实现朴素贝叶斯%特征1的取值集合A1=[1;2;3];%特征2的取值集合A2=[4;5;6];%S M LAValues={A1;A2};%Y的取值集合YValue=[-1;1];%数据集和T=[ 1,4,-1;..._朴素贝叶斯 matlab训练和测试输出
Markdown 文本换行_markdowntext 换行-程序员宅基地
文章浏览阅读1.6k次。Markdown 文本换行_markdowntext 换行
错误:0xC0000022 在运行 Microsoft Windows 非核心版本的计算机上,运行”slui.exe 0x2a 0xC0000022″以显示错误文本_错误: 0xc0000022 在运行 microsoft windows 非核心版本的计算机上,运行-程序员宅基地
文章浏览阅读6.7w次,点赞2次,收藏37次。win10 2016长期服务版激活错误解决方法:打开“注册表编辑器”;(Windows + R然后输入Regedit)修改SkipRearm的值为1:(在HKEY_LOCAL_MACHINE–》SOFTWARE–》Microsoft–》Windows NT–》CurrentVersion–》SoftwareProtectionPlatform里面,将SkipRearm的值修改为1)重..._错误: 0xc0000022 在运行 microsoft windows 非核心版本的计算机上,运行“slui.ex