linux cgroup 死循环,Linux CGroup 基础-程序员宅基地
技术标签: linux cgroup 死循环
CGroup V1
1. CGroup 概念Task: 任务,也就是进程,但这里的进程和我们通常意义上的 OS 进程有些区别,在后面会提到。
CGroup: 控制组,一个 CGroup 就是一组按照某种标准划分的Tasks。这里的标准就是 Subsystem 配置。换句话说,同一个CGroup 的 Tasks 在一个或多个 Subsystem 上使用同样的配置。
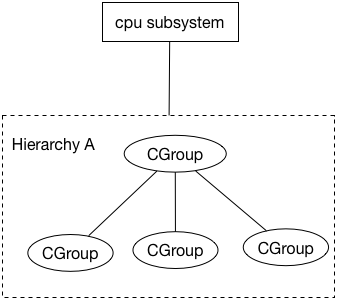
Hierarchy: 树形结构的 CGroup 层级,每个子 CGroup 节点会继承父 CGroup 节点的子系统配置,每个 Hierarchy 在初始化时会有默认的 CGroup(Root CGroup)。
Subsystem: 子系统,具体的物理资源配置,比如 CPU 使用率,内存占用,磁盘 IO 速率等。一个 Subsystem 只能附加在一个 Hierarchy 上,一个 Hierarchy 可以附加多个 Subsystem。
2. CGroup 文件系统
在具体实现中,CGroup 通过虚拟文件系统实现,一个 CGroup 就是一个文件夹,Hierarchy 层级结构通过文件夹结构实现,而每个 CGroup 的 Subsystem 配置和 Tasks 则通过文件来配置。在 Ubuntu 下,可通过lssubsys -m(需要安装cgroup-tools包),查看已有的 Subsystem:
root# lssubsys -m
cpuset /sys/fs/cgroup/cpuset
cpu,cpuacct /sys/fs/cgroup/cpu,cpuacct
blkio /sys/fs/cgroup/blkio
memory /sys/fs/cgroup/memory
devices /sys/fs/cgroup/devices
freezer /sys/fs/cgroup/freezer
net_cls,net_prio /sys/fs/cgroup/net_cls,net_prio
perf_event /sys/fs/cgroup/perf_event
hugetlb /sys/fs/cgroup/hugetlb
pids /sys/fs/cgroup/pids
这些是 Ubuntu16.04 上已实现的 Subsystem 和对应 Hierarchy。各个Subsystem 的作用可参考 RedHat CGroup Doc。在其它系统,你可以需要手动挂载虚拟文件系统并建立 Subsystem 和 Hierarchy 的关系:
root# mount -t tmpfs cgroup_root /sys/fs/cgroup
root# mkdir /sys/fs/cgroup/cpu
root# mount -t cgroup cpu -ocpu /sys/fs/cgroup/cpu
/sys/fs/cgroup/cpu 即成为附加(attach)了 CPU Subsystem 的 Hierarchy 的根目录,即 Root CGroup,我们可以在该 CGroup 下创建一个 Child CGroup:
root# mkdir /sys/fs/cgroup/cpu/demo
root# ls /sys/fs/cgroup/cpu/demo
cgroup.clone_children cgroup.procs cpuacct.stat cpuacct.usage cpuacct.usage_percpu cpu.cfs_period_us cpu.cfs_quota_us cpu.shares cpu.stat notify_on_release tasks
在创建 CGroup 时,就已经生成了一堆文件,一个 CGroup 目录中的内容大概可以分为四类:
Subsystem Conf: 如附加了 CPU Subsystem 的 CGroup 目录下的 cpu* 文件均为 CPU Subsystem 配置
Tasks: 在该 CGroup 下的 Tasks,分为两个文件,tasks 和 cgroup.procs,两者记录的都是在该进程 PID 列表,但是有所区别。
CGroup Conf: CGroup 的一些通用配置,比如 notify_on_release 用于在 CGroup 结构变更时执行 release_agent 中的命令,cgroup.clone_children 用于在 Child CGroup 创建时,自动继承父 Child CGroup 的配置,目前只有 cpuset SubSystem 支持
Child CGroups: 除以上三种文件外的子目录,如Ubuntu16.04中,每个 Root CGroup 下都有个 docker 目录,它由 Docker 创建,用于管理Docker容器的资源配置
关于 tasks 和 cgroup.procs,网上很多文章将 cgroup 的 Task 简单解释为 OS 进程,这其实不够准确,更精确地说,cgroup.procs 文件中的 PID 列表才是我们通常意义上的进程列表,而 tasks 文件中包含的 PID 实际上可以是 Linux 轻量级进程(LWP) 的 PID,而由于 Linux pthread 库的线程实际上轻量级进程实现的(Linux 内核不支持真正的线程,可通过getconf GNU_LIBPTHREAD_VERSION查看使用的 pthread 线程库版本,Ubuntu16.04上是NPTL2.23(Native Posix Thread Lib),简单来说,Linux 进程主线程 PID = 进程 PID,而其它线程的 PID (LWP PID)则是独立分配的,可通过syscall(SYS_gettid)得到。LWP 在 ps 命令中默认是被隐藏的,在/proc/目录下可以看到。为了区分方便,我们将以 Proc 来表示传统意义上的进程,以 Thread 表示 LWP 进程。
我们可以通过 ps 命令的 -T 参数将 LWP 在 SPID 列显示出来:
root# ps -ef | wc -l
218
root# ps -efT | wc -l
816
root# ps -p 28051 -lfT
F S UID PID SPID PPID C PRI NI ADDR SZ WCHAN STIME TTY TIME CMD
0 Z root 28051 28051 26889 0 80 0 - 0 exit 10:30 pts/10 00:00:00 [a.out]
1 R root 28051 28054 26889 99 80 0 - 12409 - 10:30 pts/10 00:00:10 [a.out]
1 R root 28051 28055 26889 99 80 0 - 12409 - 10:30 pts/10 00:00:10 [a.out]
以上示例中,Proc 28051 下有两个 Thread (28054,28055),即开了两个子线程。总的来说,Linux 下这种通过 LWP 来实现线程的方式,在一些时候会给用户一些困惑,比如如果我 kill -9 28055(默认在 ps 下看不到),按照 POSIX 标准,28055 “线程”所在的进程会被 Kill掉,因此28051,28054,28055三个进程都会被杀掉,感觉就很诡异。感兴趣的可以看看这篇文章)。
当要向某个 CGroup 加入 Thread 时,将Thread PID 写入 tasks 或 cgroup.procs 即可,cgroup.procs 会自动变更为该 Task 所属的 Proc PID。如果要加入 Proc 时,则只能写入到 cgroup.procs 文件(未解),tasks 文件会自动更新为该 Proc 下所有的 Thread PID。可以通过cat /proc/PID/cgroup查看某个 Proc/Thread 的 CGroup 信息,
3. 一个实例1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50#define _GNU_SOURCE /* See feature_test_macros(7) */
#include
#include
#include
#include
#include
#include
#include
const int NUM_THREADS = 5;
void *thread_main(void *threadid)
{
long tid;
tid = (long)threadid;
printf("sub thread#%ld, pid #%ld!\n", tid, syscall(SYS_gettid));
int a=0;
while(1) {
a++;
}
pthread_exit(NULL);
}
int main (int argc, char *argv[])
{
printf("main thread, pid #%ld!\n", syscall(SYS_gettid));
int num_threads;
if (argc > 1){
num_threads = atoi(argv[1]);
}
if (num_threads<=0 || num_threads>=100){
num_threads = NUM_THREADS;
}
pthread_t* threads = (pthread_t*) malloc (sizeof(pthread_t)*num_threads);
int rc;
long t;
for(t=0; t
rc = pthread_create(&threads[t], NULL, thread_main, (void *)t);
if (rc){
printf("ERROR; return code from pthread_create() is %d\n", rc);
exit(-1);
}
}
pthread_exit(NULL);
free(threads);
}
这段代码简单创建了四个死循环线程,运行:
1
2
3
4
5
6root# gcc -pthread t.c && ./a.out
main thread, pid #30354
sub thread#0, pid #30355
sub thread#2, pid #30357
sub thread#3, pid #30358
sub thread#1, pid #30356
通过 htop/top(top 默认不会显示 LWP) 看到现在四个 CPU 会被吃满,为了限制资源,我们创建一个 CGroup:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30root# mkdir /sys/fs/cgroup/cpu/wdj
# 创建 CGroup 之后,会自动生成相关文件
root# ls /sys/fs/cgroup/cpu/wdj/
cgroup.clone_children cgroup.procs cpuacct.stat cpuacct.usage cpuacct.usage_percpu cpu.cfs_period_us cpu.cfs_quota_us cpu.shares cpu.stat notify_on_release tasks
# 配置该 CGroup,CPU 使用率不能超过 50%
root# echo 50000 > /sys/fs/cgroup/cpu/wdj/cpu.cfs_quota_us
# 将 Proc PID 写入 procs
root# echo 30354 > /sys/fs/cgroup/cpu/wdj/cgroup.procs
# tasks 已经自动更新, # 此时 CPU 占用率会立即下降到 50%
root# cat /sys/fs/cgroup/cpu/wdj/tasks
30355
30356
30357
30358
# 同样的方式,再来限制下 CPU 核的使用
root# mkdir /sys/fs/cgroup/cpuset/wdj
# 限制只能使用 CPU 2,3 两个核
# 在使用前需要先执行,参考https://stackoverflow.com/questions/28348627/echo-tasks-gives-no-space-left-on-device-when-trying-to-use-cpuset
#root echo 0 > cpuset/wdj/cpuset.mems
#root echo 0 > cpuset/wdj/cpuset.cpus
echo 2,3 > /sys/fs/cgroup/cpuset/wdj/cpuset.cpu
# 这次我们将 Thread PID 写入 cgroup.procs
root# echo 30355 > /sys/fs/cgroup/cpu/wdj/cgroup.procs
# tasks 会自动更新为该 Proc下所有的 Thread PID
root# cat /sys/fs/cgroup/cpu/wdj/tasks
30355
30356
30357
30358
最终我们通过 htop 得到的效果如下:
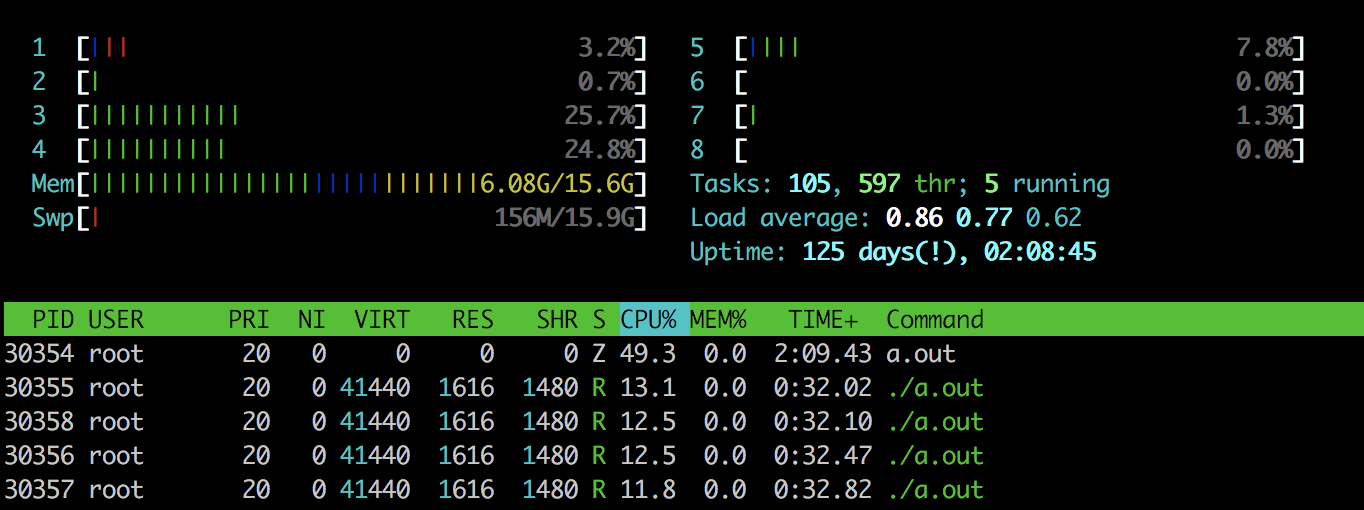
如果我们只将 Thread PID 如30356写入 /sys/fs/cgroup/cpu/wdj/tasks,则只会限制thread#1的CPU使用率。总结一下:
将 Thread PID 写入 tasks: 仅对该”线程”(LWP) 生效
将 Thread PID 写入 cgroup.procs: 会加入整个 Proc PID
将 Proc PID 写入 tasks: 没有效果,写不进去
将 Proc PID 写入 cgroup.procs: 会加入整个 Proc PID
表现有点怪异,还没找到具体原因,总的来说,目前的 CGroup 还有点乱:
Subsystem, Hierarchy, CGroup 三者的结构有点乱,将对进程的分组和对资源的控制混在了一起
由于 Linux 通过 LWP 实现 Thread,导致 CGroup 看起来可以对线程实现控制,但这方面机制不够健全,比如前面提到的加入机制
CGroup V2
CGroup V2 在 Linux Kernel 4.5中被引入,并且考虑到其它已有程序的依赖,V2 会和 V1 并存几年。针对于 CGroup V1 中 Subsystem, Herarchy, CGroup 的关系混乱,CGroup V2 中,引入 unified hierarchy 的概念,即只有一个 Hierarchy,仍然通过 mount 来挂载 CGroup V2:
mount -t cgroup2 none $MOUNT_POINT
挂载完成之后,目录下会有三个 CGroup 核心文件:
cgroup.controllers: 该文件列出当前 CGroup 支持的所有 Controller,如: cpu io memory
cgroup.procs: 在刚挂载时,Root CGroup 目录下的 cgroup.procs 文件中会包含系统当前所有的Proc PID(除了僵尸进程)。同样,可以通过将 Proc PID 写入 cgroup.procs 来将 Proc 加入到 CGroup
cgroup.subtree_control: 用于控制该 CGroup 下 Controller 开关,只有列在 cgroup.controllers 中的 Controller 才可以被开启,默认情况下所有的 Controller 都是关闭的。
这三个文件在所有的 CGroup 中都会生成,除此之外,在非 Root CGroup 下,还会有一个 cgroup.events 文件,该文件的 populated 字段会指出当前 CGroup 下的所有存活的 Proc PID,为1则表示其下存活的 Proc PID 数量>1,否则populated为0。这用于 CGroup V1的 release_agent 等事件通知,因为当最后一个进程退出 CGroup 时,cgroup.events 文件会被修改,从而触发事件。
# 查看当前 CGroup 支持的所有 Controllers
root# cat cgroup.controllers
cpu io memory
# 开启和关闭 Controller
root# echo "+cpu +memory -io" > cgroup.subtree_control
在 CGroup V2 中,A CGroup 开启了某个 Controller,则其直接子 CGroup B会生成对应的 Controller 接口文件(如 cpu.cfs_quota_us),并且B CGroup 的 cgroup.controllers 会更新。B也可以选择开启或关闭该 Controller,但影响的是 B 的直接子 CGroup。并且只有没有 Tasks 的 CGroup 即中间节点可以开关 Controller,只有叶子节点(和根节点)可以执行资源配置。这样每个节点要么控制子 CGroup 的 Controller 开关(中间节点),要么控制其下 Tasks 的资源配置(叶子节点),结构更清晰。
另外,CGroup V2 去掉了 Tasks 文件,增加了 cgroup.threads 文件,用于管理 LWP(仍然没有放弃对”线程”的支持),但语义上会清晰一些。
站在进程的角度来说,在挂载 CGroup V2时,所有已有Live Proc PID 都会加入到 Root CGroup,之后所有新创建的进程都会自动加入到父进程所属的 CGroup,由于 V2 只有一个 Hierarchy,因此一个进程同一时间只会属于一个 CGroup:
root# cat /proc/842/cgroup
...
0::/test-cgroup/test-cgroup-nested
总的来说,CGroup V2去掉了多个 Hierarchy 结构,使用 unified Hierarchy,对 Hierarchy 内部层级结构作出一些限制以保证层级逻辑清晰,并且优化了 CGroup 的文件组织(如 cgroup.events, cgroup.threads)。由于目前手头暂时没有 Kernel 4.5,只能通过文档大概了解下,还是要找机会实际体验一下。
Reference:
智能推荐
解决win10/win8/8.1 64位操作系统MT65xx preloader线刷驱动无法安装_mt65驱动-程序员宅基地
文章浏览阅读1.3w次。转载自 http://www.miui.com/thread-2003672-1-1.html 当手机在刷错包或者误修改删除系统文件后会出现无法开机或者是移动定制(联通合约机)版想刷标准版,这时就会用到线刷,首先就是安装线刷驱动。 在XP和win7上线刷是比较方便的,用那个驱动自动安装版,直接就可以安装好,完成线刷。不过现在也有好多机友换成了win8/8.1系统,再使用这个_mt65驱动
SonarQube简介及客户端集成_sonar的客户端区别-程序员宅基地
文章浏览阅读1k次。SonarQube是一个代码质量管理平台,可以扫描监测代码并给出质量评价及修改建议,通过插件机制支持25+中开发语言,可以很容易与gradle\maven\jenkins等工具进行集成,是非常流行的代码质量管控平台。通CheckStyle、findbugs等工具定位不同,SonarQube定位于平台,有完善的管理机制及强大的管理页面,并通过插件支持checkstyle及findbugs等既有的流..._sonar的客户端区别
元学习系列(六):神经图灵机详细分析_神经图灵机方法改进-程序员宅基地
文章浏览阅读3.4k次,点赞2次,收藏27次。神经图灵机是LSTM、GRU的改进版本,本质上依然包含一个外部记忆结构、可对记忆进行读写操作,主要针对读写操作进行了改进,或者说提出了一种新的读写操作思路。神经图灵机之所以叫这个名字是因为它通过深度学习模型模拟了图灵机,但是我觉得如果先去介绍图灵机的概念,就会搞得很混乱,所以这里主要从神经图灵机改进了LSTM的哪些方面入手进行讲解,同时,由于模型的结构比较复杂,为了让思路更清晰,这次也会分开几..._神经图灵机方法改进
【机器学习】机器学习模型迭代方法(Python)-程序员宅基地
文章浏览阅读2.8k次。一、模型迭代方法机器学习模型在实际应用的场景,通常要根据新增的数据下进行模型的迭代,常见的模型迭代方法有以下几种:1、全量数据重新训练一个模型,直接合并历史训练数据与新增的数据,模型直接离线学习全量数据,学习得到一个全新的模型。优缺点:这也是实际最为常见的模型迭代方式,通常模型效果也是最好的,但这样模型迭代比较耗时,资源耗费比较多,实时性较差,特别是在大数据场景更为困难;2、模型融合的方法,将旧模..._模型迭代
base64图片打成Zip包上传,以及服务端解压的简单实现_base64可以装换zip吗-程序员宅基地
文章浏览阅读2.3k次。1、前言上传图片一般采用异步上传的方式,但是异步上传带来不好的地方,就如果图片有改变或者删除,图片服务器端就会造成浪费。所以有时候就会和参数同步提交。笔者喜欢base64图片一起上传,但是图片过多时就会出现数据丢失等异常。因为tomcat的post请求默认是2M的长度限制。2、解决办法有两种:① 修改tomcat的servel.xml的配置文件,设置 maxPostSize=..._base64可以装换zip吗
Opencv自然场景文本识别系统(源码&教程)_opencv自然场景实时识别文字-程序员宅基地
文章浏览阅读1k次,点赞17次,收藏22次。Opencv自然场景文本识别系统(源码&教程)_opencv自然场景实时识别文字
随便推点
ESXi 快速复制虚拟机脚本_exsi6.7快速克隆centos-程序员宅基地
文章浏览阅读1.3k次。拷贝虚拟机文件时间比较长,因为虚拟机 flat 文件很大,所以要等。脚本完成后,以复制虚拟机文件夹。将以下脚本内容写入文件。_exsi6.7快速克隆centos
好友推荐—基于关系的java和spark代码实现_本关任务:使用 spark core 知识完成 " 好友推荐 " 的程序。-程序员宅基地
文章浏览阅读2k次。本文主要实现基于二度好友的推荐。数学公式参考于:http://blog.csdn.net/qq_14950717/article/details/52197565测试数据为自己随手画的关系图把图片整理成文本信息如下:a b c d e f yb c a f gc a b dd c a e h q re f h d af e a b gg h f bh e g i di j m n ..._本关任务:使用 spark core 知识完成 " 好友推荐 " 的程序。
南京大学-高级程序设计复习总结_南京大学高级程序设计-程序员宅基地
文章浏览阅读367次。南京大学高级程序设计期末复习总结,c++面向对象编程_南京大学高级程序设计
4.朴素贝叶斯分类器实现-matlab_朴素贝叶斯 matlab训练和测试输出-程序员宅基地
文章浏览阅读3.1k次,点赞2次,收藏12次。实现朴素贝叶斯分类器,并且根据李航《统计机器学习》第四章提供的数据训练与测试,结果与书中一致分别实现了朴素贝叶斯以及带有laplace平滑的朴素贝叶斯%书中例题实现朴素贝叶斯%特征1的取值集合A1=[1;2;3];%特征2的取值集合A2=[4;5;6];%S M LAValues={A1;A2};%Y的取值集合YValue=[-1;1];%数据集和T=[ 1,4,-1;..._朴素贝叶斯 matlab训练和测试输出
Markdown 文本换行_markdowntext 换行-程序员宅基地
文章浏览阅读1.6k次。Markdown 文本换行_markdowntext 换行
错误:0xC0000022 在运行 Microsoft Windows 非核心版本的计算机上,运行”slui.exe 0x2a 0xC0000022″以显示错误文本_错误: 0xc0000022 在运行 microsoft windows 非核心版本的计算机上,运行-程序员宅基地
文章浏览阅读6.7w次,点赞2次,收藏37次。win10 2016长期服务版激活错误解决方法:打开“注册表编辑器”;(Windows + R然后输入Regedit)修改SkipRearm的值为1:(在HKEY_LOCAL_MACHINE–》SOFTWARE–》Microsoft–》Windows NT–》CurrentVersion–》SoftwareProtectionPlatform里面,将SkipRearm的值修改为1)重..._错误: 0xc0000022 在运行 microsoft windows 非核心版本的计算机上,运行“slui.ex