Ubuntu18.04+ROS Realsense的安装与使用-程序员宅基地
文章目录
- 前言
- 一、安装软件包与librealsense
-
- 1、内核检查
- 2、Installing the packages:
-
- 2022.11.21更新:在换了ubuntu20.04(带有)5.15的内核报错后,降级到5.3重新安装依然报错(最后解决)① 首先是sudo apt-get install librealsense2-dkms报错E: Sub-process /usr/bin/dpkg returned an error code (1),这个直接谷歌就能搜到一堆解决方案;然后sudo apt-get install librealsense2-utils报错 librealsense2-utils : 依赖: libgtk-3-dev 但是它将不会被安装,直接安装libgtk-3-dev依旧报错libgtk-3-dev : 依赖: gir1.2-gtk-3.0 (= 3.24.18-1ubuntu1) 但是 3.24.20-0ubuntu1.1 正要被安装,这里直接递归装错误的包,比如这里说需要gir1.2-gtk-3.0=3.24.18-1ubuntu1,那就sudo apt install gir1.2-gtk-3.0=3.24.18-1ubuntu1,然后再装libgtk-3-dev,再报其他错,再解决。。。最终装上了。
- 可以用aptitude来解决这个依赖问题
- 二、ROS
- 总结
前言
本来觉得realsense的使用是挺简单的一回事(事实证明确实简单…),但想着之后自己可能还会多次进行配置,还是记录一下,方便以后查阅
一、安装软件包与librealsense
完全可以照着官方linux安装教程进行安装。以下几乎仅为翻译:(在安装时应断开realsense的连接)
1、内核检查
realsense DKMS kernel drivers package(就是后面需要安装的librealsense2-dkms),支持的Ubuntu LTS内核版本有:4.4, 4.8, 4.10, 4.13, 4.15, 4.18*, 5.0*, 5.3* and 5.4。可以通过 uname -r查看自己电脑内核版本,如我的为5.4.0-67-generic。
2、Installing the packages:
- 注册服务器公开密匙:(如果失败可以尝试终端使用代理再尝试)
sudo apt-key adv --keyserver keys.gnupg.net --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
- 将服务器加入仓库列表
Ubuntu 16 LTS:
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo xenial main" -u
Ubuntu 18 LTS:
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo bionic main" -u
Ubuntu 20 LTS:
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo focal main" -u
- 库安装
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
上面两行将部署librealsense2 udev规则,构建和激活内核模块,运行时库以及可执行的演示和工具。
2022.11.21更新:在换了ubuntu20.04(带有)5.15的内核报错后,降级到5.3重新安装依然报错(最后解决)① 首先是sudo apt-get install librealsense2-dkms报错E: Sub-process /usr/bin/dpkg returned an error code (1),这个直接谷歌就能搜到一堆解决方案;然后sudo apt-get install librealsense2-utils报错 librealsense2-utils : 依赖: libgtk-3-dev 但是它将不会被安装,直接安装libgtk-3-dev依旧报错libgtk-3-dev : 依赖: gir1.2-gtk-3.0 (= 3.24.18-1ubuntu1) 但是 3.24.20-0ubuntu1.1 正要被安装,这里直接递归装错误的包,比如这里说需要gir1.2-gtk-3.0=3.24.18-1ubuntu1,那就sudo apt install gir1.2-gtk-3.0=3.24.18-1ubuntu1,然后再装libgtk-3-dev,再报其他错,再解决。。。最终装上了。
可以用aptitude来解决这个依赖问题
-
验证:连接realsense,终端输入realsense-viewer即可;也可再验证,终端输入modinfo uvcvideo | grep “version:”,返回的命令中应该包含“realsense”。
-
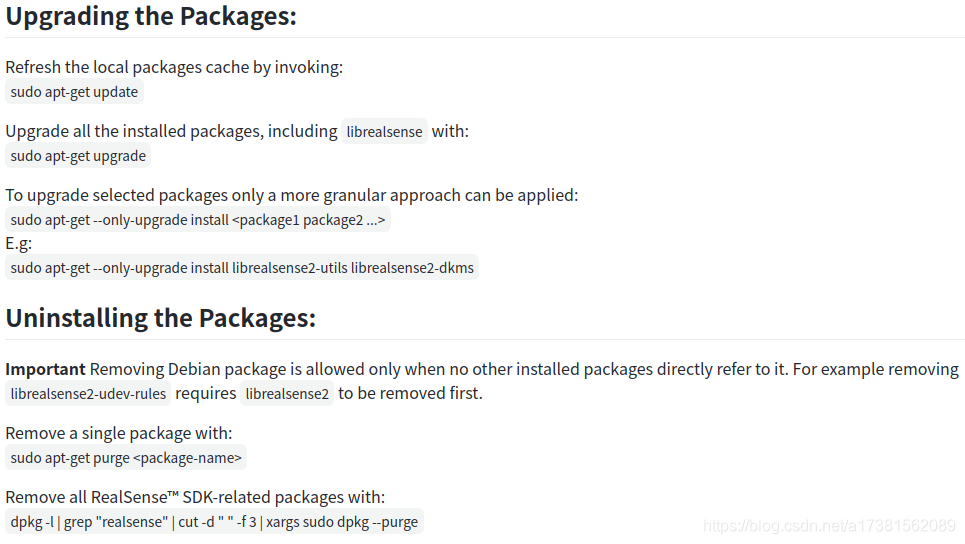
包升级与卸载
-
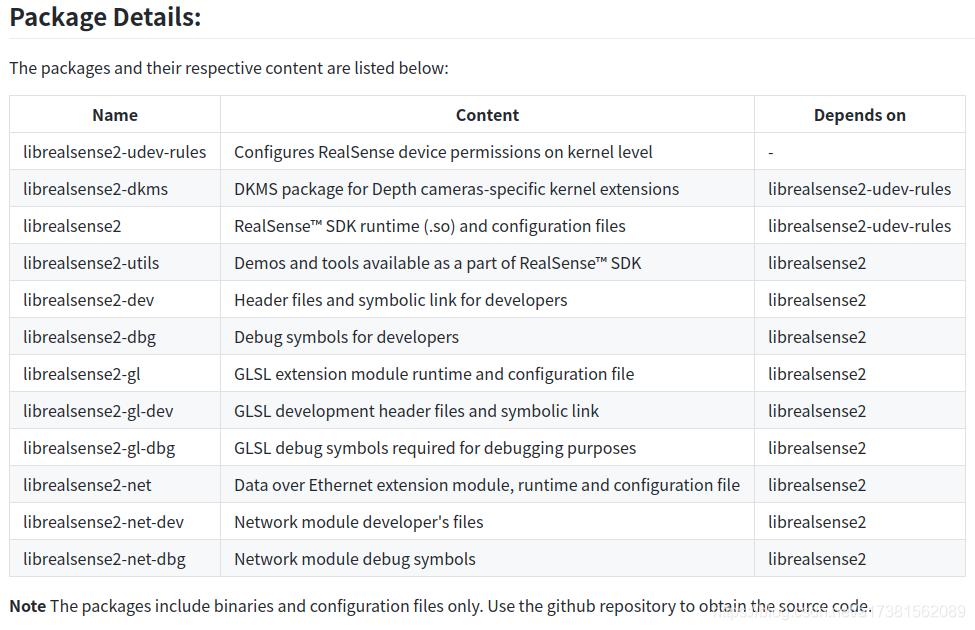
包细节
二、ROS
这一部分也有官网的参考安装,也是照着做就可以
1、包安装
采用的是官网的Method1方式,这种方式的坏处是安装的包会在/opt/ros/melodic/share/realsense2_camera路径下,并非自己的catkin_ws。使用Method2的方式可以git到自定义工作空间。推荐Method2
Method1
sudo apt-get install ros-melodic-realsense2-camera
sudo apt-get install ros-melodic-realsense2-description
Method2
首先安装之前可选安装的库,再git realsense2-ros到catkin_ws的src中,无脑catkin_make就ok。
sudo apt-get install librealsense2-dev
2、使用
- 获取/camera/depth/color/points
通过以下指令就将所有相机的所有相关信息通过ros topic的方式发布出去了
roslaunch realsense2_camera rs_camera.launch
也可通过下面命令直接查看点云信息
roslaunch realsense2_camera demo_pointcloud.launch
roslaunch realsense2_camera rs_camera.launch filters:=pointcloud
-
获取/camera/depth_registered/points
这里还需要ros的一个驱动包:git clone https://github.com/ros-drivers/rgbd_launch.git之后将rs_rgbd.launch和rs_camera.launch文件中的arg name=“enable_pointcloud” default="true"由false改为true(这一步可以获得/camera/depth/color/points),运行:
roslaunch realsense2_camera rs_rgbd.launch
这里还不太清楚这两个topic之间的差别,前者也是registered后得到的点吗?希望有大佬能够解答,也先挖个坑,以后再填。
补:
自己琢磨了半天,大致想清楚camera/depth/color/points和camera/depth_registered/points之间的区别了——:
- 首先前者camera/depth/color/points的获取方式为,利用针孔成像模型和相机的内参(焦距、光心距等),逐深度图得到点云,再按同样的方式逐彩色图将RGB信息赋予点云。参考https://blog.csdn.net/qq_43176116/article/details/93878513,里面的程序很好的说明了这一点

- 后者camera/depth_registered/points首先要做的工作就是将3D相机产生的深度图像(depth image)配准(registration),以生成配准深度图像(registed depth image)。实际上配准的目的就是想让深度图和彩色图重合在一起,即是将深度图像的图像坐标系转换到彩色图像的图像坐标系下。配准前后的对比:

参考:
https://blog.csdn.net/aichipmunk/article/details/9264703
https://www.cnblogs.com/cv-pr/p/5769617.html
如果有理解的不对的地方还望各位大佬指证,有更好的证明例子也欢迎告诉我,谢谢大噶~
还有很多参数设置(特别是filters)还需要熟悉,目前就不再深究了,能得到点云信息就Ok了
总结
还以为有多难呢,就这?
智能推荐
2024最新计算机毕业设计选题大全-程序员宅基地
文章浏览阅读1.6k次,点赞12次,收藏7次。大家好!大四的同学们毕业设计即将开始了,你们做好准备了吗?学长给大家精心整理了最新的计算机毕业设计选题,希望能为你们提供帮助。如果在选题过程中有任何疑问,都可以随时问我,我会尽力帮助大家。在选择毕业设计选题时,有几个要点需要考虑。首先,选题应与计算机专业密切相关,并且符合当前行业的发展趋势。选择与专业紧密结合的选题,可以使你们更好地运用所学知识,并为未来的职业发展奠定基础。要考虑选题的实际可行性和创新性。选题应具备一定的实践意义和应用前景,能够解决实际问题或改善现有技术。
dcn网络与公网_电信运营商DCN网络的演变与规划方法(The evolution and plan method of DCN)...-程序员宅基地
文章浏览阅读3.4k次。摘要:随着电信业务的发展和电信企业经营方式的转变,DCN网络的定位发生了重大的演变。本文基于这种变化,重点讨论DCN网络的规划方法和运维管理方法。Digest: With the development oftelecommunication bussiness and the change of management of telecomcarrier , DCN’s role will cha..._电信dcn
动手深度学习矩阵求导_向量变元是什么-程序员宅基地
文章浏览阅读442次。深度学习一部分矩阵求导知识的搬运总结_向量变元是什么
月薪已炒到15w?真心建议大家冲一冲数据新兴领域,人才缺口极大!-程序员宅基地
文章浏览阅读8次。近期,裁员的公司越来越多今天想和大家聊聊职场人的新出路。作为席卷全球的新概念ESG已然成为当前各个行业关注的最热风口目前,国内官方发布了一项ESG新证书含金量五颗星、中文ESG证书、完整ESG考试体系、名师主讲...而ESG又是与人力资源直接相关甚至在行业圈内成为大佬们的热门话题...当前行业下行,裁员的公司也越来越多大家还是冲一冲这个新兴领域01 ESG为什么重要?在双碳的大背景下,ESG已然成...
对比传统运营模式,为什么越拉越多的企业选择上云?_系统上云的前后对比-程序员宅基地
文章浏览阅读356次。云计算快速渗透到众多的行业,使中小企业受益于技术变革。最近微软SMB的一项研究发现,到今年年底,78%的中小企业将以某种方式使用云。企业希望投入少、收益高,来取得更大的发展机会。云计算将中小企业信息化的成本大幅降低,它们不必再建本地互联网基础设施,节省时间和资金,降低了企业经营风险。科技创新已成时代的潮流,中小企业上云是创新前提。云平台稳定、安全、便捷的IT环境,提升企业经营效率的同时,也为企业..._系统上云的前后对比
esxi网卡直通后虚拟机无网_esxi虚拟机无法联网-程序员宅基地
文章浏览阅读899次。出现选网卡的时候无法选中,这里应该是一个bug。3.保存退出,重启虚拟机即可。1.先随便选择一个网卡。2.勾先取消再重新勾选。_esxi虚拟机无法联网
随便推点
在LaTeX中使用.bib文件统一管理参考文献_egbib-程序员宅基地
文章浏览阅读913次。在LaTeX中,可在.tex文件的同一级目录下创建egbib.bib文件,所有的参考文件信息可以统一写在egbib.bib文件中,然后在.tex文件的\end{document}前加入如下几行代码:{\small\bibliographystyle{IEEEtran}\bibliography{egbib}}即可在文章中用~\cite{}宏命令便捷的插入文内引用,且文章的Reference部分会自动排序、编号。..._egbib
Unity Shader - Predefined Shader preprocessor macros 着色器预处理宏-程序员宅基地
文章浏览阅读950次。目录:Unity Shader - 知识点目录(先占位,后续持续更新)原文:Predefined Shader preprocessor macros版本:2019.1Predefined Shader preprocessor macros着色器预处理宏Unity 编译 shader programs 期间的一些预处理宏。(本篇的宏介绍随便看看就好,要想深入了解,还是直接看Unity...
大数据平台,从“治理”数据谈起-程序员宅基地
文章浏览阅读195次。本文目录:一、大数据时代还需要数据治理吗?二、如何面向用户开展大数据治理?三、面向用户的自服务大数据治理架构四、总结一、大数据时代还需要数据治理吗?数据平台发展过程中随处可见的数据问题大数据不是凭空而来,1981年第一个数据仓库诞生,到现在已经有了近40年的历史,相对数据仓库来说我还是个年轻人。而国内企业数据平台的建设大概从90年代末就开始了,从第一代架构出现到..._数据治理从0搭建
大学抢课python脚本_用彪悍的Python写了一个自动选课的脚本 | 学步园-程序员宅基地
文章浏览阅读2.2k次,点赞4次,收藏12次。高手请一笑而过。物理实验课别人已经做过3、4个了,自己一个还没做呢。不是咱不想做,而是咱不想起那么早,并且仅有的一次起得早,但是哈工大的服务器竟然超负荷,不停刷新还是不行,不禁感慨这才是真正的“万马争过独木桥“啊!服务器不给力啊……好了,废话少说。其实,我的想法很简单。写一个三重循环,不停地提交,直到所有的数据都accepted。其中最关键的是提交最后一个页面,因为提交用户名和密码后不需要再访问其..._哈尔滨工业大学抢课脚本
english_html_study english html-程序员宅基地
文章浏览阅读4.9k次。一些别人收集的英文站点 http://www.lifeinchina.cn (nice) http://www.huaren.us/ (nice) http://www.hindu.com (okay) http://www.italki.com www.talkdatalk.com (transfer)http://www.en8848.com.cn/yingyu/index._study english html
Cortex-M3双堆栈MSP和PSP_stm32 msp psp-程序员宅基地
文章浏览阅读5.5k次,点赞19次,收藏78次。什么是栈?在谈M3堆栈之前我们先回忆一下数据结构中的栈。栈是一种先进后出的数据结构(类似于枪支的弹夹,先放入的子弹最后打出,后放入的子弹先打出)。M3内核的堆栈也不例外,也是先进后出的。栈的作用?局部变量内存的开销,函数的调用都离不开栈。了解了栈的概念和基本作用后我们来看M3的双堆栈栈cortex-M3内核使用了双堆栈,即MSP和PSP,这极大的方便了OS的设计。MSP的含义是Main..._stm32 msp psp