
”Gazebo仿真教程--机器人建模初步“ 的搜索结果

moveit + gazebo 联合仿真问题总结MoveIt!机器人控制框架代码层面的理解实际操作问题1问题2问题3 MoveIt!机器人控制框架 官话:moveit输入用户指令,比如起始位置,输出轨迹数据,每个点通过位置速度加速度描述,...
ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用。 提供ROS接口的3D...
人机智能交互技术(ROS-HRI-人与机器人的智能交互)课程介绍与资料这是机器人系统设计与控制技术的后续课程,全部的课程内容包括四门课程(本科),如下:人机智能交互技术是人机融合的基础,课程介绍多种人机交互...



ROS机器人小车建模仿真
标签: 机器人
概念解析仿真环境用于模拟真实机器人系统,在ROS中它主要包括三大组件:机器人建模(URDF)、仿真环境创建(Gazebo)和环境感知(Rviz)。这三者结合起来,为我们提供一个全方位、系统性的仿真实现

《动手学》9.1 机器人仿真介绍 本系列教程作者:小鱼 公众号:鱼香ROS QQ交流群:139707339 教学视频地址:小鱼的B站 完整文档地址:鱼香ROS官网 版权声明:如非允许禁止转载与商业用途。 大家好,我是小鱼,本节...

同添加机器人模型一样,添加一个相机也需要进行定义一个相机的结构,参数,功能的“类”,也就是camera.xacro文件,在总的调用文件“shcRobot2_xacro_camera_gazebo.xacro”中调用即可。具体代码来源于参考文献1 &.....


URDF文件是机器人模型描述格式,一个完整的机器人模型是由一系列link和joint组成。 建模过程: 1、创建机器人功能包mbot_description,以及依赖文件urdf和xacro, (1) 创建新文件夹:urdf:存放机器人模型的URDF...

ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真urdf Gazebo V-Rep Webots Morse书中,大部分出现hydro的地方。直接替换为indigo或jade或kinetic,就可以在相应版本号中使用。提供ROS接口的3D...
基于ROS实现移动机器人编队仿真,可以在gazebo和rviz中显示多机器人,并可以发布cmd_vel指令单独控制其中某个机器人
Gazeop是一款仿真软件,和ROS有非常好的兼容性,通常来说使用rviz就可以满足绝大部分需求,但是要考虑真实世界的物理属性的话(比如摩擦力,空气阻力,湿度,地面凹凸程度等),就需要用到Gazepo 1.添加源 sudo ...


ros中利用gazebo进行gmapping仿真:kobuki+kinct -> kobuki+rplidar 2d slam 仿真 1. 准备的源码。 可以建一个新的ros工作空间 gampping_ws,在github下面下载好相应的源码。注意更新下gazebo下的model,不然要在线...

最近科研需要在gazebo中做一个阿克曼小车的仿真,要求小车运动能够通过话题来控制,小车上要安装激光雷达、imu、相机等传感器用于SLAM定位建图。由于是第一次接触gazebo仿真,所以分享一下学习心得
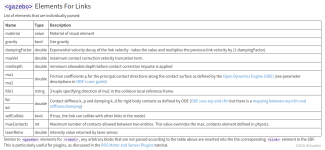
注意:Ĉx、Ĉy、Ĉz 相对于 L̂x、L̂y、L̂z 的方向由 标签中的 rpy 值指定。它们定义的几何形状的组合构成了刚体(link)的可视化表示。所有自由度都被锁定。表示从 Lo(刚体坐标系原点)到 Co(刚体质量中心)的...
现在,我们将构建一个简单的机器人——轮式车辆模型,并添加一个传感器,使其能够使机器人跟随目标点(人)。 使用模型编辑器,我们可以在图形用户界面(GUI)中构造简单的模型。对于更复杂的模型,您需要学习如何...
推荐文章
- Vue 2项目如何升级到Vue 3?_vue2项目换成vue3-程序员宅基地
- Activiti工作流使用详细介绍_activiti开启工作流-程序员宅基地
- 十大排序算法总结(c++版本)-程序员宅基地
- 新颖的基于BS结构的毕业设计题目50例_bs实训题目-程序员宅基地
- GVRP基础配置_gvrp unrecognized command-程序员宅基地
- MeterSphere使用MySQL8.0部署(Windows10)_metersphere mysql-程序员宅基地
- 简单的重写控件_自定义控件通常要重写哪些方法-程序员宅基地
- 十三周一次课Nginx负载均衡、ssl原理、生成ssl密钥对、配置ssl-程序员宅基地
- curviloft插件怎么用_【su】插件及其功能图示-程序员宅基地
- JAVA使用Gson排除特定字段_java po排除某个字段-程序员宅基地