ROS是机器人操作系统,它提供了一种灵活的机器人建模和控制框架。在ROS中,机器人可以被建模为一个或多个节点,每个节点可以执行特定的任务,例如传感器读取、运动控制和数据处理。ROS还提供了一些常用的机器人模型...
”Gazebo仿真教程--机器人建模初步“ 的搜索结果

参考古月老师ROS机器人开发实践 这本书还是挺适合初学者的 1、step1 文件开头 <?xml version="1.0"?> 第一行是本文件的版本 第二行别的都不用管,唯一要注意的是name的赋值,取名字为mrobt,这个名字对其他...
ROS理论与实践——四、机器人仿真前言一、URDF模型优化1 xacro模型文件使用方法1.1 常量定义1.2 数学计算1.3 宏定义1.4 文件包含2 xacro模型文件运行3 xacro模型显示二、rviz仿真1.引入库2.读入数据总结 前言 本文...
作者:知乎@Ai酱安装UR机器人ROS包$ sudo apt-get install ros-kinetic-universal-robot查询下看看有哪些包是和UR机器相关$ sudo rospack list | grep urur5_moveit_config /opt/ros/kinetic/share/ur5_moveit_...
精通ROS机器人编程 - 第二版使用机器人操作系统设计、构建和仿真复杂机器人(书籍链接)The second edition of book Mastering ROS for Robotics Programming 在使用ROS时的最佳实践指南和故障排除解决方案主要特色...
Nav2通用教程-3
标签: 机器人
我们提供了以上的说明,假设你想在自己的机器人上运行 SLAM,该机器人会有独立的模拟/机器人接口和导航启动文件,而这些文件在 `tb3_simulation_launch.py` 中合并,方便进行简单测试。它提到如果你只想在 Turtlebot...


上节 讲解机器人建模、相关建模语言、简单传感器模型 中节讲解控制器,包括ros_control, ArbotiX差分控制器 下节主要介绍gazebo,讲解如何构建仿真环境、机器人如何在仿真环境中的运动 第七章:机器人的建模与仿真...
在软件模拟方面,可以使用机器人仿真软件,如V-REP、Gazebo等,进行机器人腿部建模和轨迹规划的仿真。在这些仿真软件中,可以通过添加机器人模型、设置运动学参数、添加控制器等来完成机器人腿部建模。而在进行轨迹...


1、创建机器人模型 URDF XACRO 模型显示:Rviz gazebo 将xacro转成urdf: $ rosrun xacro xacro.py xx.xacro>xx.urdf 直接调用xacro文件解析器: arg name=“robot_description” default=“robot_description” ...

三维仿真是一种在机器人应用程序开发过程中进行测试和快速迭代的可持续方法。机器人操作系统(ROS)是多种机器人软件工具的中间件,还提供Rviz和Gazebo等模拟平台。本文介绍如何为简单的 4 自由度机器人手臂创建 ROS...
本文以构造带碰撞属性的多行人场景为例,介绍Gazebo插件制作流程

之前我们创建xacro文件的时候,每个物体只有一个简单的可视化属性,如果要在Gazebo中实现的话,需要对这些可视化模型的每个link添加碰撞属性以及惯性参数。以base_link为例: <link name="base_link"> <...

1.gazebo仿真常见问题 以下的坑,是从小鱼自己的悲惨经历,还有鱼粉们问小鱼问题一起总结而来的。 机器人一飞冲天,然后开始蹦迪 机器人无法控制,没有里程计、雷达数据等等 一打开机器人直接蹦迪乱动,有时候表现...
目标:使用xacro优化建立的urdf机器人模型,在rviz和gazebo中进行仿真,为以后控制算法和SLAM算法做准备。 Xacro(XML Macros)Xacro是一种XML宏语言。 使用xacro,您可以通过使用宏命令构建更精悍短小但又具有更高...
例如,可以使用Gazebo仿真平台对小车进行虚拟环境下的仿真测试,通过仿真可以更快速地验证和优化算法;同时,可以使用Rviz可视化工具对小车的运动、传感器数据等进行可视化展示和调试。 总之,ROS提供了丰富的功能...
1.ROS2前世今生2.ROS与ROS2对比3.动手安装ROS24.ROS2初体验。
V-REP学习记录00 前言目的:1 需学习的内容0.完成以上任务需要1.环境的基本使用2.模型建立与仿真3.LUA语言4....adams :前些年比较主流的仿真软件,一般和matlab交互使用,但是教程不多,界面也不...
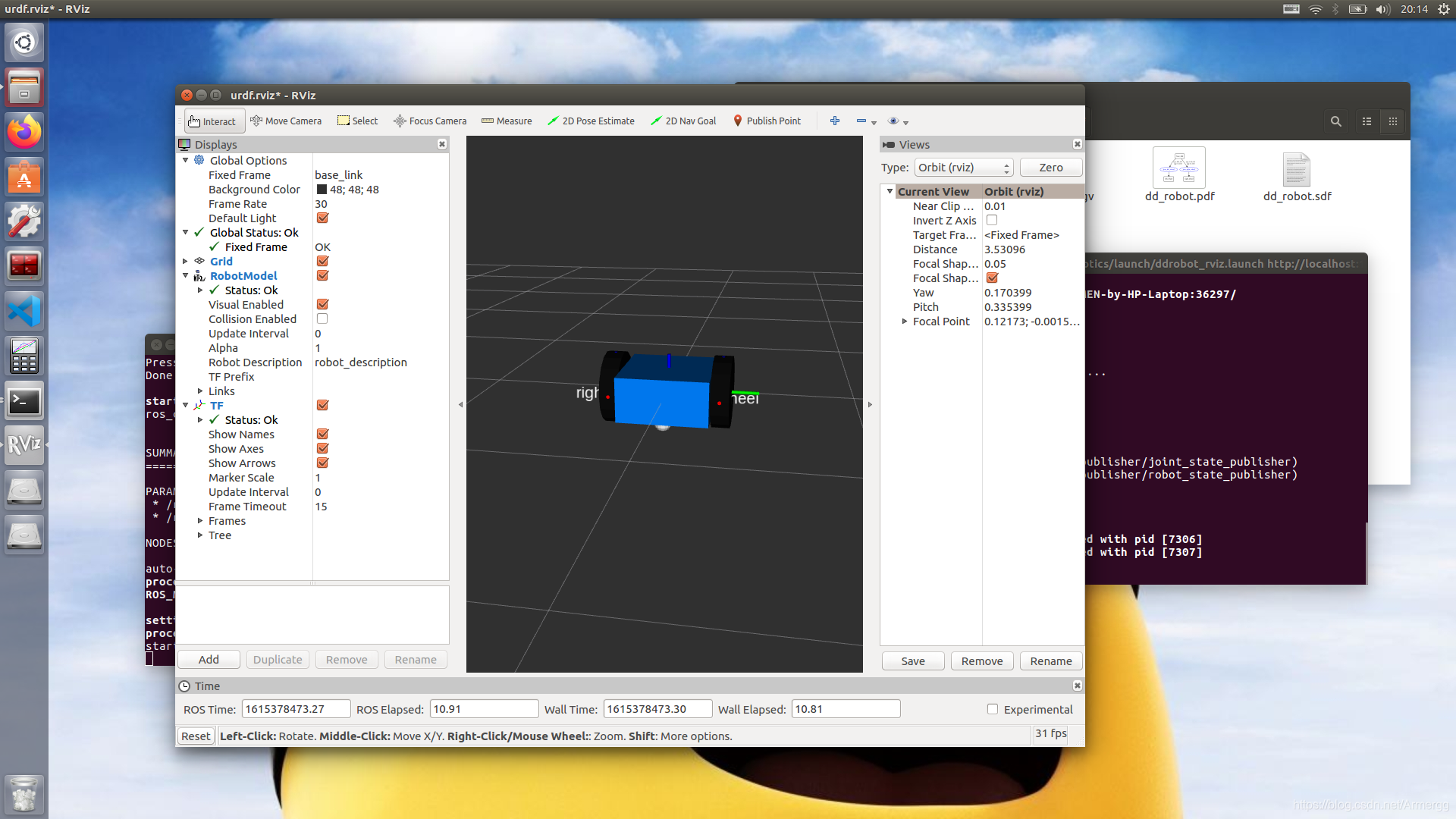
ROS入门七 机器人建模——URDFURDFufdf介绍语法创建机器人URDF模型创建机器人描述功能包创建URDF模型在rviz中显示模型 URDF ufdf介绍 用于描述机器人结构的格式。根据该格式的设计者所言,设计这一格式的目的在于...
gazebo 属性并修改为 xacro 中,模型建立的顺序是正确的,也能够在 rviz 中显示,但是加载 arbotix 配置后出现如下错误,模型的 tf 树始终都是断的,网上提到的方法几乎尝试遍了也没有解决这个问题,纠结了好几天,...
推荐文章
- 前端canvas项目实战——在线图文编辑器(九):逻辑画布
- 【团体程序设计天梯赛】往年关键真题 L2-026 小字辈 递归 & L2-027 名人堂与代金券 排序 详细分析&完整AC代码
- C++里的new
- 怎样在 Ubuntu 中修改默认程序_ubuntu20.04开机logo界面修改默认unity-程序员宅基地
- C语言初阶-函数-程序员宅基地
- Java+Mysql +SpringBoot个人网盘系统92922-计算机毕业设计(可赠源码)_springboot 网盘-程序员宅基地
- 基于微信小程序的体育课评分系统+ssm+vue.js附带文章和源代码设计说明文档ppt-程序员宅基地
- Python 三种读文件方法read(), readline(), readlines()及去掉换行符\n_python 文件读取 \n-程序员宅基地
- Python sklearn MLP 报错 ValueError: Unknown label type: (array..._valueerror: unknown label type: (array(-程序员宅基地
- VxWorks中信号量实现任务间通信与同步机制分析_信号量集可以多任务间的数据通讯-程序员宅基地