”Matlab机器人工具箱“ 的搜索结果
本文主要介绍如何在matlab中建立机械臂模型(前提要下载了Robotics Toolbox机器人工具箱~),并进行基于正逆运动学计算的轨迹运动。对于已有的Solidworks机械臂三维模型,如何导入Matlab,并对其进行运动控制。
matlab机器人工具箱
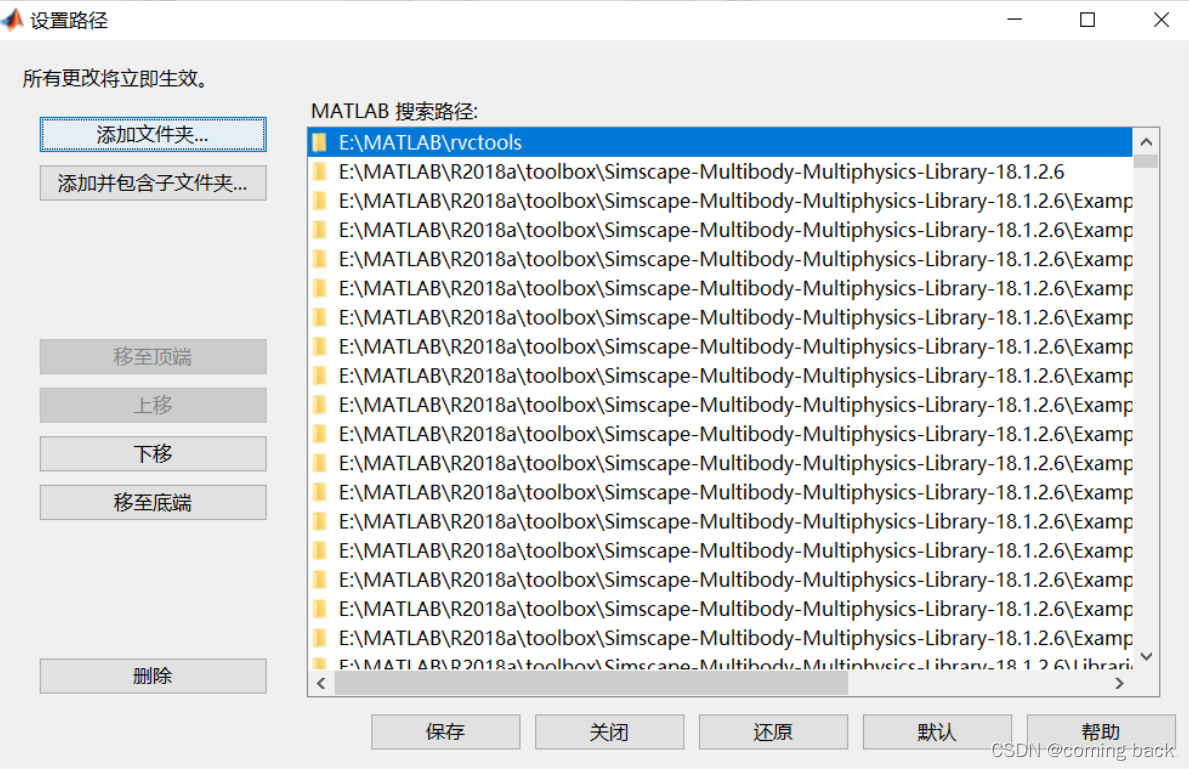
Matlab机器人工具箱安装与使用
MATLAB安装机器人工具箱(Robotics Toolbox for MATLAB, RTB)三种方法
详细介绍如何安装机器人工具箱以及如何添加Simulink到的工具箱中。
Robotics toolbox是澳大利亚昆士兰理工大学Peter Corke教授研发的用于机器人运动学、动力学、轨迹生成的工具,方便机器人学的研究者在matlab中进行仿真。 二、具体安装方法: 1.首先安装Matlab,我使用的版本是2020b...
本次安装环境为Windows 11+MATLAB 2023a,所安装的机器人工具箱的版本为RTB 10.4,后续将有详细的讲解不同的机器人工具箱的版本区别。工具箱还提供了在数据类型之间进行操作和转换的函数,例如:向量、旋转矩阵、...
matlab机器人工具箱实现机械臂直线轨迹&圆弧轨迹规划(带sw模型+matlab程序+报告)
我的大三的机器人控制原理课程设计及,利用机器人工具箱,进行六自由度的机械臂的直线轨迹规划和圆弧轨迹规划,完全可用,参数可改,有注释说明
来源于课程设计,利用机器人工具箱10.4实现了关节角度空间轨迹生成和规划和笛卡尔空间圆弧轨迹和直线轨迹的生成规划。每种都提供了四种规划方式包含:匀速运动,带抛物线过渡段的轨迹规划,三次多项式轨迹规划,五次...
该工具箱为MATLAB机器人工具箱,有PUMA560等多种常见的机器人模型,也可以自己定义模型,自己设定姿态变换,运动轨迹等,本资源只为更多的人共享,故设为最少的1分
matlab机器人工具箱,版本是10.1的,用起来还可以,机器人建模仿真必备。
matlab 源码
文档详细介绍了如何运用MATLAB机器人工具箱对机器人进行运动和动力学分析
机器人工具箱10.2版本,可用于MATLAB 2018b,下载后解压到对应MATLAB文件夹即可。
由于一个机器人包含的技术和任务太多,所以我们为了在之前的理论技术上开发新的算法就需要借助matlab工具箱来帮我们提高效率。MATLAB机器人工具箱就为了研究机器人的运动学、动力学及视觉等提供了一种方便

输出:Tsim表示每个采样时间点,q、qd表示各关节角度、角速度。设定关节角度、角速度的初值,并确定力矩函数中所含的参数。输入:T表示整个时间间隔,torqfun表示力矩函数。正动力学函数,根据力矩求解关节值。...

matlab机器人工具箱最新版10.3.1,已经适用matlab2018a

matlab机器人工具箱包含两自由度和六自由度两种机器人的几种经典控制算法,只需在算法参数设置修改成自己的机器人结构参数,便可得到仿真的结果,也可在经典算法的基础上修改设计自己的算法。
Matlab机器人工具箱的讲解文档,作者就是工具箱的开发者,具体讲解了机器人视觉和机器人控制等问题。高清的文字版,并且带有书签和彩图。


作者为大三学生,本博客为边学习边使用,如有错误,请见谅。在文章结束附加代码。

推荐文章
- Android 编译so文件 MP4V2_android下编译mp4v2-程序员宅基地
- 通讯录Contact_02_contact文件内容-程序员宅基地
- Qt笔记(四十二)之QZXing的编译 配置 使用_qzxingfilterrunnable error:-程序员宅基地
- 关于画图软件Dia打开程序始终为英文界面的问题-程序员宅基地
- OpenCV从入门到精通实战(二)——文档OCR识别(tesseract)-程序员宅基地
- 详解avcodec_receive_packet 11_avcodec_receive_packet eagain-程序员宅基地
- OpenGL SuperBible 7th源码编译记录_superbible7-media github-程序员宅基地
- Wireshark简单使用-程序员宅基地
- MXNet 粗糙的使用指南_iou loss mxnet-程序员宅基地
- iOS对ipa包进行代码混淆《二》 ---代码混淆_ipa包混淆-程序员宅基地