1.ROS2前世今生2.ROS与ROS2对比3.动手安装ROS24.ROS2初体验。
”ROS2“ 的搜索结果
ros2使用自建类型编译,订阅以及发布的demo,并且包括和protobuf互转的使用方式. 自建类型为序列化数据{uint32 size, uint8 data[] }
【ROS2】MOMO的鱼香ROS2(二)ROS2入门篇——ROS2初体验
sick 激光雷达ros2功能包/官方源码
跟随赵老师学习,最后做出自己的ROS2小车
ROS2 学习(一)ROS2 简介与基本使用
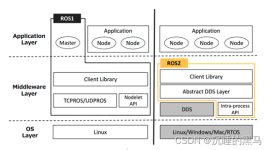
要说ROS2,那就不得不提起ROS,ROS就是机器人操作系统英文全称(Robot Operating System),但ROS本身并不是一个操作系统,而是可以安装在现在已有的操作系统上(Linux、Windows、Mac)上的软件和工具集。ROS出生于2007...
ros2中文指南.pdf
标签: ROS2 AI
ROS2开发中文指南,ROS开发必备。ROS2是新的ROS版本。相对与旧版本更加接近工业化场景,更加稳定,同时功能也更加丰富。
ros1和ros2的区别,要点记录
在上一讲开发环境搭建中,我们讲解了如何搭建Ubuntu系统环境和ROS2开发运行环境。类似ros1 master中心节点功能,用于减少节点之间发现的时间。info 显示话题消息类型,订阅者数量,发布者数量。创建功能包命令:指定...
每版的Ubuntu系统版本都有与之对应ROS版本的,每一版ROS都有其对应版本的Ubuntu版本,不可随便装,ubuntu20.04对应ROS1 noetic和ROS2 foxy版本。
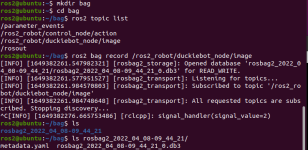
ros2常用命令,ros2 pkg,ros2 node, ros2 topic, ros2 param, ros2 bag, ros2 service, ros2 action
ROS2学习(1)ROS2简述
标签: ROS2
ros2配置与使用

ROS1迁移到ROS2基础教程
标签: c++
将 ROS 1 包转换为 ROS 2包例子前言一、ROS1代码1. ros1工作空区的目录布局2. 代码2.1 src/talker/package.xml2.2 src/talker/CMakeLists.txt2.3 src/talker/talker.cpp3. 构建 ROS 1 代码4. 运行 ROS 1 节点4.1 ...
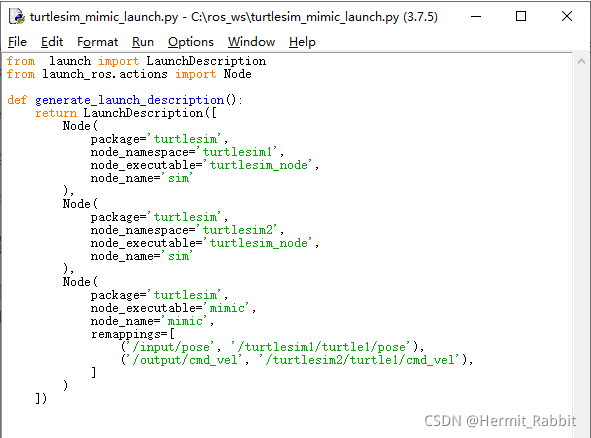
ROS到ROS2的多节点组合运行
标签: ros
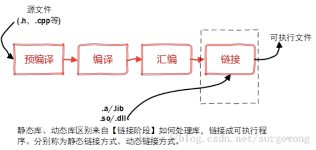
但是在ROS2中如何使用多节点组合去完成管理,这也是我们需要去了解和学习的。在ROS1中你可以写一个节点也可以写一个小节点(Nodelet)。 ROS 1 的节点会被编译成一个可执行文件。 ROS 1的小节点会被编译成一个动态链接...


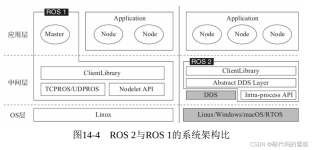
ROS2入门教程-基本概念 介绍ROS2的基本概念 1. 基本概念: ROS是一个用于在不同进程间匿名的发布、订阅、传递信息的中间件。 ROS2系统的核心部分是ROS网络(ROS Graph)。 ROS网络是指在ROS系统中不同的节点间相互通信...
推荐文章
- confluence搭建部署_ata confluence-程序员宅基地
- SpringCloud与SpringBoot版本对应关系_springboot 2.1.1 对于的cloud-程序员宅基地
- 如何恢复硬盘数据?简单解决问题_磁盘恢复 csdn-程序员宅基地
- 苹果手机测试网络速度的软件,App Store 上的“网速测试大师-测网速首选”-程序员宅基地
- 教了一年少儿编程,说说感想和体验-程序员宅基地
- 22东华大学计算机专硕854考研上岸实录-程序员宅基地
- 如何用《玉树芝兰》入门数据科学?-程序员宅基地
- macOS使用brew包管理器_brew清理缓存-程序员宅基地
- 【echarts没有刷新】用按钮切换echarts图表的时候,该消失的图表还在,加个key属性就解决了_echarts 怎么加key值-程序员宅基地
- 常用机器学习的模型和算法_常见机器学习模型算法整理和对应超参数表格整理-程序员宅基地