”ROS工作空间“ 的搜索结果

face recognition
创建ROS的工作空间和功能包
一、创建工作空间 1. 创建工作空间目录并初始化 首先找一个存放工作空间的地方,我放在了桌面,然后在桌面打开terminal,开始: # 1. 递归创建工作空间目录 $ mkdir -p catkin_ws/src # 2. 进入src目录 $ cd ...
但是如果真的在不同工作空间下放着同名的功能包,ros 在运行某个功能包的时候,同名功能包运行的顺序是什么?会放置描述功能包的一些具体信息,比如版本号,该功能包具体依赖哪些其他的功能包等等。同一工作空间下,...
ROS命名空间 和 参数加载ROS命名空间参数设置 ROS命名空间 ROS命名空间,在我的理解就是我们在一个范围下(这个范围就是指的是命名空间)建立变量,节点等。这些变量,节点的有效范围就是他所在的命名空间。一般默认...
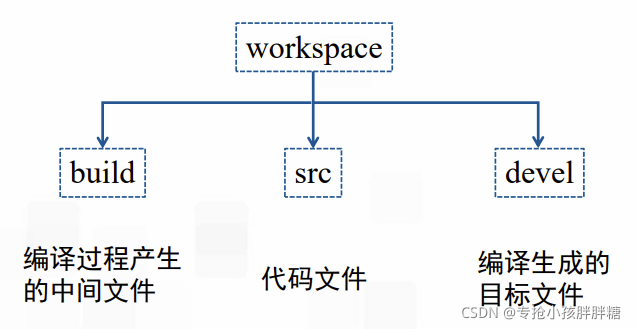
ROS工作空间(workspace)是一个存放工程开发相关文件的文件夹。
ROS工作空间的初始化
标签: ubuntu
无
所谓工作空间覆盖,是指不同工作空间中,存在重名的功能包的情形。
ROS工作空间创建方法


Ros工作空间的编译
标签: 机器人
ros创建工作空间的流程

1 创建ROS工作空间 一开始不太明白为什么要创建工作空间,后来在知乎上看到这篇文章https://zhuanlan.zhihu.com/p/91673574。创建ROS的工作空间,就相当于创建一个ROS的工程。 ROS一般称作为操作系统,但是我感觉它...

用VScode 来进行ros程序开发非常方便,因此下面介绍VScode进行ros工作空间的建立 步骤: 1、终端下手动创建ros工作空间 mkdir -p demo6_ws/src 格式:mkdir -p 工作空间名字/src 注意必须要有/src子集工作...
ROS工作空间和功能包


ros自定义全局路径规划器并内置到ros工作空间 最近做移动机器人的运动规划,需要用到分层自适应路径规划算法。ROS内部已经集成了多种全局路径规划器(BaseGlobalPlanner)和局部路径规划器(BaseLocalPlanner),...
ros工作空间文件位置改变解决办法改变ros工作空间的原因如何解决删掉build和devel文件夹进入src文件夹,删除cmake文件,重新初始化工作空间重新编译生成build和devel文件夹重新初始化环境变量至此已经解决!...
ROS工作空间、功能包创建,编译相关的C++/python程序详解
Ros 机器人基本命令,以及搭建helloworld 工程
1、安装ROS http://wiki.ros.org/ROS/Installation或参考 2、设置环境变量 3、创建工作空间 参考http://wiki.ros.org/ROS/Tutorials/InstallingandConfiguringROSEnvironment
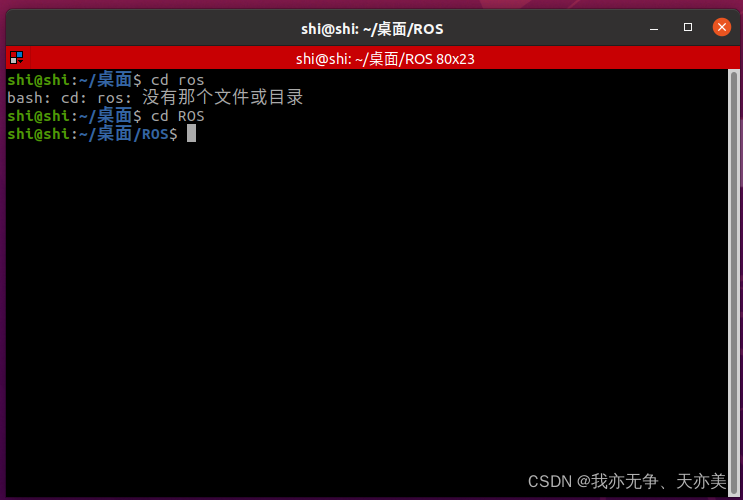
2.在文件夹中新建一个文件夹名字叫src,在ros工作空间中src文件夹是必须的。 3.在文件夹中右键打开终端,如果不是右键打开终端,需要手动进入该文件夹。 然后输入 catkin_make 出现上图就算是成功。 4进入...
上述命令,首先会创建一个工作空间以及一个 src 子目录,然后再进入工作空间调用 catkin_make命令编译。 2、进入 src 创建 ros 包并添加依赖 cd src catkin_create_pkg 自定义ros包名字 roscpp ro.
推荐文章
- 小说网站系统源码|PHP付费小说网站源码带app-程序员宅基地
- Swift编码规范_swift 正则判断文件类型-程序员宅基地
- 关于shell 中return用法解释(转)_shell return-程序员宅基地
- Linux编译宏BUILD_BUG_ON_ZERO-程序员宅基地
- c51语言单片机打铃系统设计,基于单片机的自动打铃系统的设计-程序员宅基地
- 在php中使用SMTP通过密抄批量发送邮件-程序员宅基地
- python数据清洗+数据可视化_python课程题目数据清除与可视化-程序员宅基地
- 【11g】3.3 Oracle自动存储管理存储配置_oraclestorageoptions-程序员宅基地
- signature=b2f9171fa2897cefe08a669efaf58433,FULFILLMENT TRACKING IN ASSET-DRIVEN WORKFLOW MODELING-程序员宅基地
- 宜兴市计算机中等学校,重磅!江苏省陶都中等专业学校正式揭牌!-程序员宅基地