”卡尔曼滤波算法“ 的搜索结果

参考文献1:https://blog.csdn.net/victor_zy/article/details/82862904 参考文献2:https://blog.csdn.net/honyniu/article/details/88697520?spm=1001.2014.3001.5501
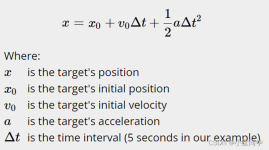
一、系统的状态方程 xkx_{k}xk 是状态分量的 nnn维矢量 AAA 是 n∗nn * nn∗n 的状态转移矩阵,也就是对目标状态转换的猜想模型,是已知的 uk−1u_{k-1}uk−1 是新的,让系统可以接受外部控制 ...
详细讲解了卡尔曼滤波算法的每一个步骤,附有C语言代码实现,有部分笔记,以及笔记笔录,认真看应该能看懂
卡尔曼滤波

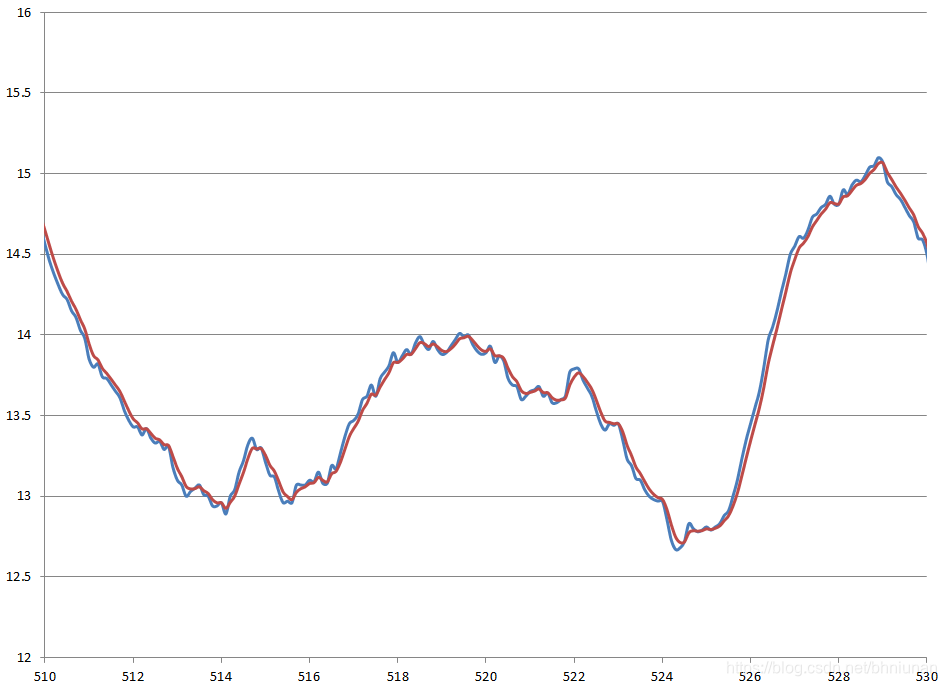
滤波算法(一):卡尔曼滤波算法
标签: 算法
状态方程是描述某个物理系统状态随时间变化的数学表达式。它通常是以微分方程或差分方程的形式表示,并描述系统的状态变量随时间的变化。状态方程可以用来预测系统未来的状态或根据已知的状态预测系统的过去状态。...
分类: 计算机视觉 转载过来的,觉得不错,原文 ... ...在学习卡尔曼滤波器之前,首先看看为什么叫“卡尔曼”。跟其他著名的理论(例如傅立叶变换,泰勒级数等等)一样,卡尔曼也是一个人的名字,而跟他们不同的

资源名:自适应卡尔曼滤波估算SOC模型_锂电池模型_SOC估算模型_卡尔曼滤波算法_锂电池SOC估算模型_matlab仿真 资源类型:matlab项目全套源码 源码说明: 全部项目源码都是经过测试校正后百分百成功运行的,如果您...
基于STM32 icm20602卡尔曼滤波算法,使用cubemx编译通过,测试平台为STM32F4开发版,优化解决icm20602四元素算法中可能出现的死区问题和特殊角度出现的加速度角度偏差问题,可用于飞行器等调试,底层完整,可直接...
提出了一种新的自适应卡尔曼滤波算法。该算法假设系统过程噪声方差和量测噪声方差之间存在的函数关系已知,两种噪声方差随着时间变化且均未知。先令当前时刻的过程噪声方差等于前一时刻的过程噪声方差,通过变分贝叶斯...
扩展卡尔曼滤波算法的matlab程序.doc
卡尔曼滤波算法与matlab实现
利用改进扩展卡尔曼滤波算法来估算电池的SOC模型
stm32 MPU6050 DMP引擎和卡尔曼滤波算法两种方法解算姿态角.rar
程序是一个基于RTS平滑的正弦信号滤波平滑算法的对比,Matlab中运行main.m文件即可。具体算法可以参考博客 https://blog.csdn.net/weixin_42647783/article/details/106035691。
6轴加速度传感器LMS6DS3TR_C驱动程序,里面包含两种算法,计算姿态角,利用四轴上位机工具协议可发送数据显示状态。
算法:标准的无迹卡尔曼滤波 仿真场景:三维目标,CV模型 传感器类型:主动雷达 MATLAB仿真仿真实现; 仿真结果:三维跟踪轨迹,各个维度跟踪轨迹 位置RMSE 速度RMSE 各维度跟踪轨迹,跟踪误差误差,各个维度跟踪误差...
3.内容:基于卡尔曼滤波算法的轨迹跟踪matlab仿真。 for t=ta(2:end) Ps=F*P*F'; K=Ps*H'*(H*Ps*H'+R)^(-1); xc=F*xc+K*(z(:,nc)-H*F*xc); P=(I-K*H)*Ps*(I-K*H)'+K*R*K'; %P=(I-K*H)*Ps; xca=[xca xc]; % ...
本代码为容积卡尔曼算法的简单程序,仅用于个人研究卡尔曼滤波,不可用于其他用途。转发注明出处。
该文档是卡尔曼滤波算法在FPGA中实现的所有源代码,采用Verilog硬件描述语言。
基于51单片机实现MPU6050的卡尔曼滤波算法(小车)代码分享 博主github: https://github.com/MichaelBeechan
资源名:无迹卡尔曼滤波估算SOC模型及代码_卡尔曼滤波算法_SOC估算模型_锂电池SOC估算模型_matlab仿真 资源类型:matlab项目全套源码 源码说明: 全部项目源码都是经过测试校正后百分百成功运行的,如果您下载后不能...
无迹卡尔曼滤波(UKF)是重要的非线性滤波方法。无迹卡尔曼滤波方法是通过...从仿真分析中可以看出,无迹卡尔曼滤波在跟踪方面有很高的精度,与传统的扩展卡尔曼滤波算法相比较,无迹卡尔曼滤波算法有较小的跟踪误差。
基于扩展卡尔曼滤波算法的飞机姿态控制matlab程序
用C++实现了卡尔曼滤波对飞行轨迹的预测算法,并附有测试数据
推荐文章
- com.netflix.discovery.shared.transport.TransportException: Cannot execute request on any known serve-程序员宅基地
- PAT乙级练习题1010 一元多项式求导_pat 乙级 1010-程序员宅基地
- You can also run `php --ini` inside terminal to see which files are used by PH P in CLI mode_you can also run `php --ini` in a terminal to see -程序员宅基地
- 对UDP校验和的理解_udp 数据包 校验和 checksum=0-程序员宅基地
- 递归遍历文件夹,以c:/windows为例-程序员宅基地
- git 本地与远程的链接_git如何本地和网页链接-程序员宅基地
- ArrayList与HashMap遍历删除元素,HashMap与ArrayList的clone体修改之间影响_在arraylist和hashmap遍历的同时删除元素,可能会导致一些问题发生-程序员宅基地
- Chapter2-软件构造过程和生命周期_iterative and agile systems development lifecycle -程序员宅基地
- 4.6 浮动定位方式float_c语言中float的左右浮动属性示例-程序员宅基地
- OSS上传【下载乱码问题】_阿里云oss文件名乱码-程序员宅基地