自动驾驶算法(十):多项式轨迹与Minimun Snap闭式求解原理及代码讲解
”多项式轨迹“ 的搜索结果
基于MATLAB的五次多项式轨迹规划,可直接进行仿真,运行出仿真图。
多项式轨迹规划.pdf
标签: 多项式轨迹
多项式轨迹规划,是对己上传的两个stm32实现工程的解释
自动驾驶算法(九):多项式轨迹与Minimun Snap原理与Matab代码详解
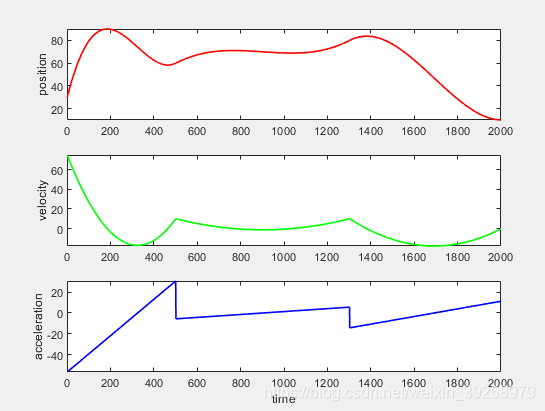
可自定义DH参数和起始点的各个关节角度,得出各个关节的位移、速度和加速度曲线
改进的粒子群算法3-5-3机械臂多项式轨迹规划 完整的代码,包运行;运行操作视频见CSDN资源!适合小白!
常用的多项式规划一般泛指3次、5次和7次等多项式规划,4次多项式规划用到的比较少,暂不介绍。为什么奇数次多项式比较常用呢?因为其有偶数个系数!偶数个系数有什么用呢?能列偶数个方程来求解,偶数个方程可能包括...
通过仿真验证,我们发现基于多项式插值的轨迹规划方法能够有效地生成平滑的轨迹曲线,满足机器人运动的需求。同时,通过ROS C++/Python/Matlab的仿真验证,我们证明了该方法的有效性和可实现性。在机器人技术中,...

课程设计,利用工具箱实现了机械臂的直线,圆弧,五次多项式规划,内部封装,底耦合,机械臂模型默认三自由度,模块化,易于更改,注释完全,圆弧规划提供了抛物线过渡段轨迹优化
轨迹规划三次多项式差值在MATLAB中的使用代码
改进的粒子群算法3-5-3机械臂多项式轨迹规划 完整的代码,方可运行;可提供运行操作视频!适合小白!
改进的粒子群算法3-5-3机械臂多项式轨迹规划 完整的代码,方可运行;可提供运行操作视频!适合小白!
基于遗传算法的最优时间B样条轨迹,复现文章3.6节中的分析
多项式轨迹–三次轨迹 1.4 Cubic trajectory 图 3 三次多项式轨迹 一旦指定了t0,t1{{t}_{0}},{{t}_{1}}t0,t1时刻的位置和速度的值(q0,q1v0,v1)\left({{q}_{0}},{{q}_{1}}{{v}_{0}},{{v}_{1}} \right)(q0,q1...
改进的粒子群算法3-5-3机械臂多项式轨迹规划 完整的代码,方可运行;可提供运行操作视频!适合小白!
Matlab研究室上传的视频均有对应的完整代码,皆可运行,亲测可用,适合小白; 1、代码压缩包内容 主函数:main.m; 调用函数:其他m文件;无需运行 运行结果效果图; 2、代码运行版本 ...若运行有误,根据提示修改;...
#多项式轨迹–五次多项式 1.5 Polynomial of degree five 利用三次多项式,根据过q0,q1,…,qnq_0,q_1,\ldots,q_nq0,q1,…,qn确定的轨迹的特征是位置和速度连续,但是加速度不连续(参见上一篇博客轨迹规划–三...
本文提出了一种基于改进粒子群算法实现3-5-3机械臂多项式轨迹规划的方法。该方法首先建立了3-5-3机械臂的动力学模型,并对其进行简化。然后,使用改进的粒子群算法对多项式轨迹进行优化,以满足给定的轨迹约束条件。...
本文提出了一种基于改进粒子群算法实现3-5-3机械臂多项式轨迹规划的方法。该方法首先建立了3-5-3机械臂的动力学模型,并对其进行简化。然后,使用改进的粒子群算法对多项式轨迹进行优化,以满足给定的轨迹约束条件。...
3次多项式轨迹规划FB SCL语言3次多项式轨迹规划功能块 3次多项式轨迹规划FB SCL语言3次多项式轨迹规划功能块 运动控制 轨迹规划 PLC SCL ST代码
多项式轨迹–七次多项式 1.6 Polynomial of degree seven 在某些特定场合,可能需要定义更高阶次的多项式来获得平滑的轨迹。具有七次的多项式如下 q(t)=a0+a1(t−t0)+a2(t−t0)2+a3(t−t0)3+a4(t−t0)4+a5(t−t0)5+...
本文提出了一种基于改进粒子群算法实现3-5-3机械臂多项式轨迹规划的方法。该方法首先建立了3-5-3机械臂的动力学模型,并对其进行简化。然后,使用改进的粒子群算法对多项式轨迹进行优化,以满足给定的轨迹约束条件。...
本文提出了一种基于改进粒子群算法实现3-5-3机械臂多项式轨迹规划的方法。该方法首先建立了3-5-3机械臂的动力学模型,并对其进行简化。然后,使用改进的粒子群算法对多项式轨迹进行优化,以满足给定的轨迹约束条件。...
多项式轨迹实战 梯形速度曲线轨迹 双S形速度曲线轨迹 多个自由度轨迹的时间同步 在线轨迹规划 多项式在线轨迹规划 梯形在线轨迹规划 双S形在线轨迹规划 非线性实时轨迹滤波 多点轨迹(Multi-point) 三次样条...

(二)五次多项式轨迹规划
标签: 机器人算法

多项式轨迹推导
机械臂轨迹规划之三次多项式插值规划matlab仿真程序 多项式插值(polynomial interopolation)在工业中的应用十分常见,常用的几种多项式插值法有:直接法、拉格朗日插值法和牛顿插值法。多项式插值轨迹规划也是一种...
推荐文章
- Android 编译so文件 MP4V2_android下编译mp4v2-程序员宅基地
- 通讯录Contact_02_contact文件内容-程序员宅基地
- Qt笔记(四十二)之QZXing的编译 配置 使用_qzxingfilterrunnable error:-程序员宅基地
- 关于画图软件Dia打开程序始终为英文界面的问题-程序员宅基地
- OpenCV从入门到精通实战(二)——文档OCR识别(tesseract)-程序员宅基地
- 详解avcodec_receive_packet 11_avcodec_receive_packet eagain-程序员宅基地
- OpenGL SuperBible 7th源码编译记录_superbible7-media github-程序员宅基地
- Wireshark简单使用-程序员宅基地
- MXNet 粗糙的使用指南_iou loss mxnet-程序员宅基地
- iOS对ipa包进行代码混淆《二》 ---代码混淆_ipa包混淆-程序员宅基地