速度曲线规划之S形曲线
标签: 机器人
速度曲线规划之S形曲线
标签: 机器人
速度曲线规划之S形曲线
本文主要讲述S形速度规划方案,包括sigmoid函数、sin函数和bezier曲线速度方案。已知初速度Vs,末速度Ve,规划速度曲线分别是sigmoid函数曲线、sin函数曲线、bezier曲线。 一 曲线速度规划方案 1 sigmoid函数曲线...
codesys电子凸轮曲线的规划与调整方法,想要丝般顺滑的凸轮曲线,就来参考下吧,嘿嘿 参考博客地址:https://blog.csdn.net/qq_19979629/article/details/122426709 codesys版本V3.5 .14.10,最新版的V3.5 .17.20可以...
标签: S型曲线规划
在伺服行业,位置规划通常有T型规划和S型规划,T型规划由于加速度不连续,导致冲击过大,在某些应用场景无法使用,需要用到S型曲线规划。S型曲线规划的实现比较复杂,有些采用位置指令滤波的方式,无法设定加速度;...
标签: S型曲线规划
S型曲线规划 堆垛机应用
【代码】速度规划:用s形曲线规划速度------pencv c++绘图(2)
本文介绍了运动控制终的S曲线,通过matlab和C语言实现并进行仿真;篇幅较长,自备茶水;
标签: 小车曲线规划仿真
小车曲线规划仿真 程序代码下载https://download.csdn.net/download/yjw0911/85677358
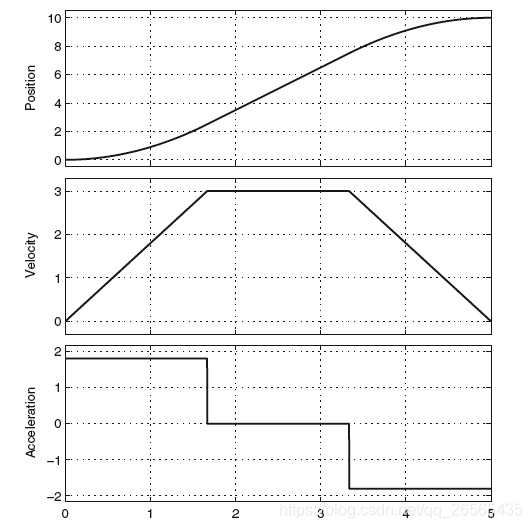
机器人轨迹这一系列轨迹教程将主要包括以下内容:点到点轨迹(P2P)在线轨迹规划多点轨迹(Multi-point)时间最优轨迹双S轨迹相比梯形轨迹,更加的平滑,梯形轨迹本质上是将一段点到点的轨迹分为三段(加速——匀速...
包含n个控制点(含起点和终点)B样条曲线的移动机器人轨迹规划程序,所生成的轨迹必须严格经过起点、第三个控制点和终点(可调)

S型速度曲线轨迹规划还可以参考下面文章链接:带平滑功能的斜坡函数这里我们介绍的S型速度曲线轨迹规划并是纯S型速度曲线,函数公式如下。


内含matlab程序文件及实验报告,主要解决的是用B样条曲线实现无人车的路径规划,规划一条由起点出发到达终点的光滑曲线,为了避开这些障碍点,给定一组控制点,由这些控制点牵引小车躲避障碍,从而得到一条光滑的...
如果应用中不需要安全功能,则应当使用模块 SM0 (无安全功能),这样控制器就能被释放,然后进行操作。功能差别在于“安全停车”和是否支持可参数化功能,如“安全限制速度”,以及是否合并在安全总线系统中。...
运动学约束、参数化曲线、路径优化、五次多项式和三次螺旋线
基于目标距离的S型速度曲线规划 C语言实现 编译环境tubor c++3.0 算法计算由C语言实现 速度规划的数据写入到了mem_v.txt文档内, 可以使用excel将文档内的数据导入,(mem_v.txt内数据的分隔符为逗号‘,’), ...
双S曲线轨迹规划,可用于两点之间最短时间规划,并且可以约束速度和加速度最大值

已知:换道初始纵坐标y0(横向距离),换道初始航向角tan0,换道时间t,换道结束纵坐标yf,换道结束航向角tanf,车速VehSpd,曲线中点曲率q且曲率变化率为0。求解期望的规划曲线。
小车曲线规划仿真 程序下载链接:https://download.csdn.net/download/yjw0911/85677358
S曲线规划,Matlab仿真代码,采用七段式编写,.m文件,直接可用。

提供一种T型和S型曲线规划的实现方法,提供C++代码和验证结果。
包含n个控制点(含起点和终点)B样条曲线的移动机器人轨迹规划程序,所生成的轨迹必须严格经过起点、第三个控制点和终点(可调)
标签: 经验分享

1.版本:matlab2019a,内含运行结果,不会运行可私信 2.领域:基础教程 3.内容:Matlab 基于S型曲线的连续多段曲线插补平滑过渡的规划算法.zip 4.适合人群:本科,硕士等教研学习使用
