ubuntu系统下使用ros控制UR真实机械臂,逻辑清晰,亲测有效
”机械“ 的搜索结果

基于yolov5与Moveit!的机械臂拾取的教程导航帖
如何挑选机械键盘?高性价比的机械键盘推荐 本文首发于知乎:如何挑选机械键盘?高性价比的机械键盘推荐 又到了一年一度的618购物节了,想要买一把机械键盘(给自己、送男友、送礼物)的读者看过来啦。 本文将介绍...

机械臂手眼标定-使用AUBO机械臂自动标定 通过上两节的我们已经知道怎么使用已经获取的坐标数据进行计算手眼位姿,以及怎么获取标记物在相机中的位姿了,这一节我们来讲一下怎么使用AUBO的机械臂获取机械臂的位姿,...
我秋招准备不是很充分,但是也收获了比较满意的offer,整个秋招下来我认为最重要的几点如下:1.简历要打磨好,突出自己的优势,我的竞赛比较多,然后我就单独做了个荣誉奖项的模块,项目经历是面试流程中最重要的一...
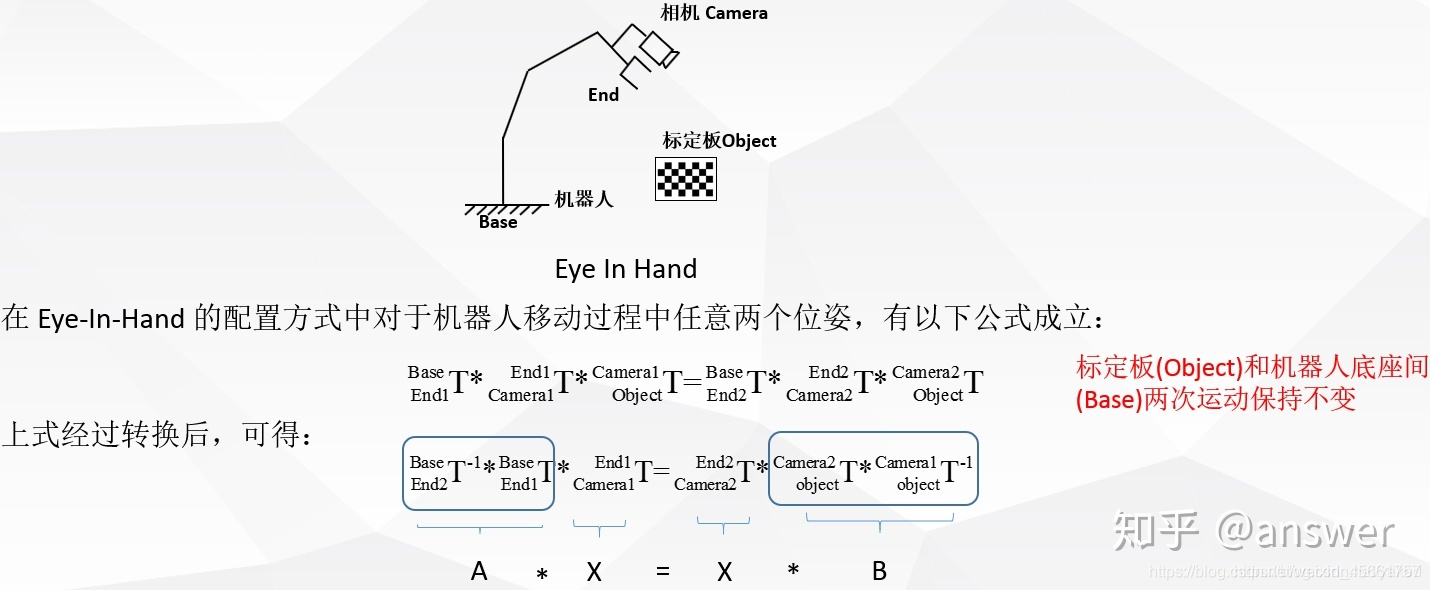




机械臂在运动时,往往需要配合视觉信息进行目标的定位或识别,这就涉及到如何将相机坐标系(Camera Frame)下的物体转换到机械臂自身的坐标系下(Base Frame)。这一问题一般通过手眼标定(Hand-Eye Calibration...
中国机械停车设备投资分析与前景规划建议报告2022-2028年 【报告编号】: 415526 【出版时间】: 2022年3月 【出版机构】: 中商经济研究网 第一章:中国机械停车设备行业综述 第一节 机械停车设备行业定义 ...
文章目录四轴机械臂实物Robotic ToolBox机械臂建模1.建立机械臂的D-H表建立机械臂坐标系根据坐标系建立D-H表2.代码建模机械臂运动学仿真1.正运动学仿真2.逆运动学仿真 为了能够实现机械臂的运动轨迹规划,同时更加...
[1]中文名机械台班费用定额组成不变费用、可变费用等编制原则施工机械型、机械预算价格确定等编制依据《公路工程机械台班费用定额》等机械台班费用定额组成编辑语音由不变费用和可变费用两大部分组成1、不变费用根据...
2021年参加校内电子竞赛所做的课题,发出来留作纪念纪念,也希望能对大家有所帮助。此项目获得了校电赛三等奖: )


文件名大小更新时间D-H方法建模思想,matlab建立机械臂运动学仿真软件\Robotic Manipulator Kinematics\scm\bmp\fig_cloos.bmp750542005-08-03D-H方法建模思想,matlab建立机械臂运动学仿真软件\Robotic Manipulator...



设想未来将将机械臂 SolidWorks 三维模型导入 ADAMS 软件中,建立了机械臂的动力学仿真模型,在机械臂受力最不利的位姿下分工况进行了动力学仿真,求解计算出关节各工况的最大启动力矩,对所选电机的驱动扭矩进行了...

那些年用过的机械键盘
标签: 键盘 Keychron机械键盘



推荐文章
- Python字典类型及操作_字典是键值对的结合,键值对之间没有顺序。-程序员宅基地
- shader学习集锦-程序员宅基地
- python 一个整数,它加上100后是一个完全平方数,再加上168又是一个完全平方数,请问该数是多少?_一个整数,它加上100后是一个完全平方数,再加上168又是一个完全平方数,请问该数是-程序员宅基地
- Linux时间子系统之六:高精度定时器(HRTIMER)的原理和实现 ._timekeeping_delta_to_ns-程序员宅基地
- TTS | 语音合成模型实验结果经验总结_use_duration_discriminator-程序员宅基地
- Android技术框架篇(三):MVVM框架_android mvvm-程序员宅基地
- 第4章c语言作业_c语言第四章作业-程序员宅基地
- PCL1.8+Ubuntu16.04安装详解-程序员宅基地
- win11 文件拖到任务栏无法打开的解决办法_win11文件拖到任务栏打不开-程序员宅基地
- STM32WB55大半年开发记录,血氧心率检测手环-程序员宅基地