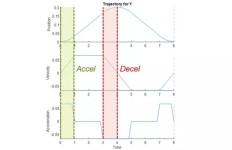
速度级的雅可比方法对于不同机械臂的逆解解算过程是一样的,而且不需要机械臂的逆解存在解析解,是一种通用的逆运动学求解方法。与位置级的逆运动学求解方法相比,该方法的缺点是计算量大(求雅可比矩阵)、速度慢,...
”机械“ 的搜索结果

------关于机械手的一些知识,我之前介绍了关于基于视觉伺服技术的机械手控制的两种方法,即基于图像的视觉伺服和基于位置的视觉伺服,在这一部分,我将介绍通过举例介绍什么事机械手的正运动学问题,什么是机械手的...





摘要:《机械制图》课程的重要性是由本课程的研究对象——图样本身的重要性所决定的。图样是传递设计思想的信息载体,是生产过程中加工(或装配)和检验(或调试)的依据。图样是工程界进行交流的技术语言。在课程导入时,...
论文写作指导:请加QQ229366758【摘要】在MATLAB环境下,对puma560机器人进行运动学仿真研究,利用Robotics Toolbox工具箱编制了简单的程序语句,建立机器人运动学模型,与可视化图形界面,利用D-H参数法对机器人的...
机械转行java自学经历,零基础学java,血泪总结的干货 据说,再恩爱的夫妻,一生中都有100次想离婚的念头和50次想掐死对方的冲动。 求职路上亦是如此,打开这篇文章,相信你也有转行的想法。和身边的朋友聊过,...

一、编程接口提供C++、Python、GUI、命令行等接口move_group节点Python和C++接口示例MoveIt关注更多的是plan工作,后面的execute需要控制器执行,MoveIt只是监控功能。编程步骤连接控制需要的规划组左臂右臂设置目标...

市面上有很多公司销售企业级机械硬盘驱动器和普通机械硬盘,这导致了我们有时候都不知道两者有什么区别,该选择哪种类型的了。什么是机械硬盘硬盘有机械硬盘(HDD)和固态硬盘(SSD)之分。机械硬盘即是传统普通硬盘,...
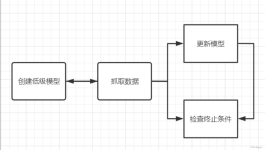
机械臂动力学参数辨识学习笔记
标签: 学习
机械臂动力学参数辨识
您好,自动机械表手动上弦是没有尽头的,上到一定程度就空转了,不会把发条弄断的,和手动上弦是不一样的。但是自动机械表经常手动上弦真的会损害机芯,如果您平时运动量不多,就买手动上弦的或者石英表吧。一般来说...
这是新的一个板块,专注于机械臂仿真的研究,上一个板块我写了关于小车,darknet_ros的yolo,机械臂这三者的融合,当然上一个板块依旧存在不少问题没解决,但是主线已经走通,时间上不允许,我只能直接开始这一板块...


100个机械实用设计计算小软件.
标签: 机械
100个机械实用设计计算小软件.可以协助你进行适当的机械设计工作
机械类是工科中一个涵盖专业比较广的学科,包括机械制造及其自动化、机械电子工程、机电一体化、工业设计专业等多个强势专业。科研方面,机械类期刊也是十分多,其中不乏《通用机械》、《中国机械工程学报》、《农业...

实现gazebo与moveit的联合仿真
描述机械硬盘的寿命机械硬盘寿命一般按年算,在3年或5年以上。当然超过使用寿命并不是不能用,而是性能下降,有噪声。如何延长机械硬盘的寿命1、保持电脑工作环境清洁硬盘以带有超精过滤纸的呼吸孔与外界相通,它...
机械臂正逆运动学-----数值解建立DH坐标系求正运动学单关节齐次传递矩阵正运动学:返回齐次矩阵正运动学:返回欧拉角向量求雅可比矩阵求机械臂逆运动学合成通用运动学类 机械臂的运动学包括正运动学和逆运动学,其...

与机械臂控制1、创作机械臂模型如何改变文本的样式插入链接与图片如何插入一段漂亮的代码片生成一个适合你的列表创建一个表格设定内容居中、居左、居右SmartyPants创建一个自定义列表如何创建一个注脚注释也是必不可...
推荐文章
- Android实现图片高斯模糊_android gaussian blur-程序员宅基地
- linux 查找文件 locate,linux文件查找(find,locate)-程序员宅基地
- 二阶矩阵特征值与特征向量的计算matlab程序(可指定计算精度)_求二次型的特征值的matlab算法-程序员宅基地
- anaconda环境下的tensorflow版本安装及查看_ancacoda中如何查看tensorflow版本-程序员宅基地
- 〖Python 数据库开发实战 - MongoDB篇①〗- MongoDB数据库简介_〖python 数据库开发实战 - mongodb篇 〗- mongodb数据的导入导出-程序员宅基地
- [Vuejs+php] MySQL数据转JSON传值到前端-程序员宅基地
- GPS开发、定位修改_virtualposition-程序员宅基地
- Ionic 创建自定义模块(module)_ionicmodule-程序员宅基地
- Java从入门到入坟_Day01_java 从入门到入坟-程序员宅基地
- React生命周期详解-程序员宅基地