梯形速度分布的轨迹规划,从本质上来说,是一个分段函数的轨迹规划,基本的方式是一个先加速,再匀速,再减速的三段函数的过程。当然,当间隔时间太短时,会出现分段函数只有加速和减速,无匀速的情况。或者因为开始...
”梯形轨迹“ 的搜索结果
ODrive的梯形轨迹
标签: odrive
实际应用中,需要电机又快又稳的转到指定位置,梯形轨迹(INPUT_MODE_TRAP_TRAJ)本质上是一个分段函数的轨迹规划,是一个先加速,再匀速,再减速的三段函数的过程。2804电机100kv,12V电源,最高速度为1200RPM = 20...
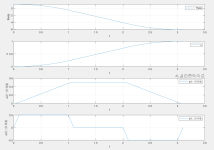
MATLAB机器人工具箱中函数lspb可以用于计算并生成梯形速度曲线,下面的命令生成从位置0运动到1的梯形速度轨迹曲线,时间步数为50步,最大速度为默认值
梯形速度曲线轨迹 双S形速度曲线轨迹 多个自由度轨迹的时间同步 在线轨迹规划 多项式在线轨迹规划 梯形在线轨迹规划 双S形在线轨迹规划 非线性实时轨迹滤波 多点轨迹(Multi-point) 三次样条曲线(cubic ...
S形速度曲线轨迹规划算法和应用详细介绍,请查看下面文章博客,这里不再赘述:S速度曲线轨迹规划(普通变频位置闭环控制算法详细介绍+SCL代码)_RXXW_Dor的博客-程序员宅基地。

螺旋线运动轨迹控制梯形图程序.rar 介绍了关于螺旋线运动轨迹控制梯形图程序的详细说明,提供运动控制器的技术资料的下载。
功能 给定始末位置和时间信息,规划出轨迹的位置、速度和加速度 端口 输入端 1. Time 沿轨迹的时间点,指定为标量或向量。通常,当指定为标量时...给定轨迹航路点位置,指定为nxp矩阵,其中n是轨迹维数,p是轨迹点...


梯形速度曲线轨迹规划与控制算法
标签: 控制算法
梯形速度曲线轨迹规划与控制算法是一种常用于运动控制系统中的路径规划方法,它可以实现平滑的加速和减速过程,确保系统在运动过程中具有良好的动态性能和稳定性。本文将详细介绍梯形速度曲线轨迹规划与控制算法的...
文章目录...使用b样条生成多项式轨迹。 % 生成一个分段三次b样条轨迹 % control points---表示一组二维xy控制点,控制点构成直线段多边形,b样条根据这些控制点生成多边形对应的曲线 % tI...


在介绍本专栏之前,大家可以参考另一篇博图PLC的梯形加减速点动功能块介绍文章梯形加减速点动功能块(博途SCL)_RXXW_Dor的博客-程序员宅基地文章浏览阅读184次。

机器人轨迹这一系列轨迹教程将主要包括以下内容:点到点轨迹(P2P)在线轨迹规划多点轨迹(Multi-point)时间最优轨迹双S轨迹相比梯形轨迹,更加的平滑,梯形轨迹本质上是将一段点到点的轨迹分为三段(加速——匀速...
因为机器人运动涉及位置和姿态两个量 , 所以在速度规划和前 瞻控制中还需要考虑二者的 同步 ,即在同一规划时间内机器人末端要满 足轨迹的位置 和姿态的联动 , 这 就对控制算法提供了更高的要求 。关节型多轴...
轨迹规划器(梯形轨迹); 技术 使用的软件和语言: C++ 版本 11; CMake 最低要求版本 3.14; 需要特定工具和外部库 获取内容 googletest GIT_TAG 版本 - 1.8.0 本征 GIT_TAG - 3.3.7 可以使用 FetchContent 将上述...

梯形速度曲线轨迹 双S形速度曲线轨迹 多个自由度轨迹的时间同步 在线轨迹规划 多项式在线轨迹规划 梯形在线轨迹规划 双S形在线轨迹规划 非线性实时轨迹滤波 多点轨迹(Multi-point) 三次样条曲线(cubic ...
用qt编写的笛卡尔空间圆弧轨迹插值算法,将插值结果保存到文件中,利用matlab画出圆弧轨迹,及速度加速曲线。其中速度规划采用梯形速度规划。插值算法代码用qt打开,轨迹结果用matlab打开画出轨迹查看。
五次多项式 五次多项式表达式如下: q(t)=k0+k1t+k2t2+k3t3+k3t3+k4t4+k5t5q(t)=k_0+k_1t+k_2t^2+k_3t^3+k_3t3+k_4t^4+k_5t^5q(t)=k0+k1t+k2t2+k3t3+k3t3+k4t4+k5t5 特点: 加速度连续 ...
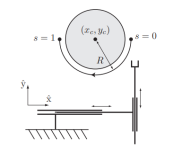
点到点的轨迹规划算法可以理解为在规定的时间T内,从已知起始点运动到末尾点的方法。这里引入中间变量s(t),它是时间的函数,定义域为[0,T],值域为[0,1],s与的关系见下面公式。这个公式不难理解,当s=0时,;当s=1时...
机器人、运动控制等常用的轨迹规划有三次多项式、五次多项式、梯形速度规划,S型速度规划,今天我们主要介绍三次多项式轨迹规划,有关T型和S型轨迹规划大家可以查看下面文章博客,这里不再赘述,梯形轨迹规划梯形...
位置控制用PD控制器,详细内容介绍请查看下面博客文章:PD控制器算法详细解读_RXXW_Dor的博客-程序员宅基地...S速度曲线轨迹规划问题(普通变频位置闭环控制算法介绍+SCL代码)_RXXW_Dor的博客-程序员宅基地。SMART PLC脉冲控制。
公式pai=4*∫10dx/(1+x2)把[0.1]分成10等份,用两中方法分别计算=======================================================class work2 { public static void main (string args[]){ double h = 0.1;...//复化梯形求...
推荐文章
- Solox 性能数据实时收集工具-程序员宅基地
- 淘系资深技术专家接受InfoQ采访表示:端智能必将成为驱动业务创新的核心推动力...-程序员宅基地
- Elasticsearch 索引优化_es 优化索引 健康状态没有变化-程序员宅基地
- 接口自动化测试(Python+Requests+Unittest)合集详解教程_带requests的python在线运行环境-程序员宅基地
- MAST中安装spatial-correlation-sampler踩坑记录_spatial-correlation-sampler gcc版本对应-程序员宅基地
- LangChain入门指南-程序员宅基地
- 【智能车入门:面包板】(蓝牙遥控、超声波避障、红外循迹)-程序员宅基地
- 网络安全与应用程序安全-程序员宅基地
- HTML+CSS+JS网页设计期末课程大作业 web前端开发技术 web课程设计 网页规划与设计_标题为提升《html5+css3 web前端设计》课程作业质量,结合课程知识技术特点,同-程序员宅基地
- c语言如何使四种运算符同级,二 如何学习C语言的运算符和运算顺序-程序员宅基地