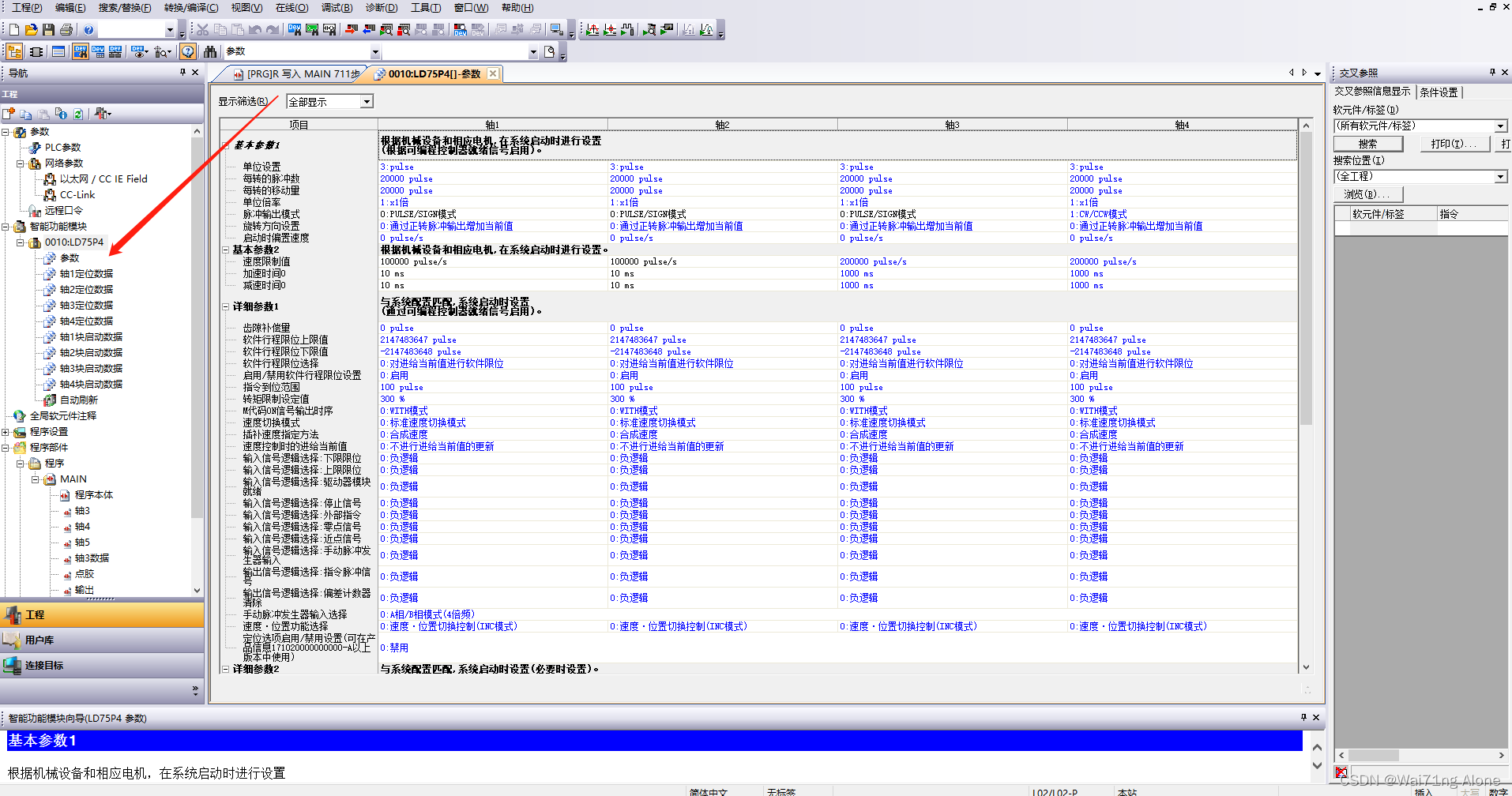
基于三菱PLC的两轴圆弧插补
标签: 算法
标签: 算法

plc相关的rede软件,采用梯形图来模拟乒乓球赛的比赛过程。球的运行轨迹灯为8个,设有a,b击发球按钮与a,b方得分指示灯。
简介:模型预测控制在机器人学的应用,涉及线性MPC、非线性MPC以及粒子群优化算法的JLT问题求解。

在实现插补运动时,通常需要运动控制器、驱动器和运动系统等硬件设备的支持,同时需要使用相关的运动控制软件进行编程和控制。在实际使用中,根据具体的运动控制卡型号和使用环境,可以选择不同的速度规划方法,或...

标签: 经验分享

通过联合优化无人机的运动轨迹和调度策略,提出了一个多阶段随机优化问题来最小化长期信息年龄(AoI)。为了简化这一问题,我们通过排队系统对无人机的数据缓冲区和AoI状态进行了动态建模,并提出了一种新的考虑AoI...
说明:记录自己阅读源码的笔记。 1.目录说明 固件位于Firmare下面: Board\V3: 板级文件,都是自带或者cube生成的, ----drivers:stm32库代码 ...----Inc:cube生成的头文件 ...----Src:cube生成的源文件 启动函数...
在伺服系统以及作动机构的加减速动作中,为了让速度更加平滑,可以引入梯形速度曲线规划(T-curve velocity profile),梯形曲线是一种时间最优的曲线,在工业界被广泛采用。本文将对GCKontrol中的梯形速度曲线规划...
《电机数学模型完整版》由会员分享,可在线阅读,更多相关《电机数学模型完整版(14页珍藏版)》请在人人文库网上搜索。1、电机数学模型以二相导通星形三相六状态为例,分析BLDC的数学模型及电磁转矩等特性。...

编写一个Java应用程序,该程序中有三个类:Triangle、Trapezoid和Circle,分别用来刻画“三角形”、“梯形”和“圆形”。具体要求如下: 1.Triangle类具有类型为double的三个边,以及周长、面积属性,Triangle类具有...

1、简介 对于轨迹点
理论力学——在线考试复习资料 一、单选题 1.已知W=100kN,P=80kN,摩擦系数f=0.2,物块将( )。 A....B....C....2.已知、、、为作用刚体上的平面共点力系,其力矢关系如图所示为平行四边形,因此可知( )。...A....B....
梯形加减速(与抛物线拟合的线性函数) 梯形曲线在电机控制中经常被用到,因为其速度曲线形状为梯形,因此被称为梯形...
1、PLC的一阶低通滤波器实现PLC信号处理系列之一阶低通(RC)滤波器算法_一阶rc滤波器 数字-程序员宅基地文章浏览阅读4.2k次。1、先看看RC滤波的优缺点 优点:采用数字滤波算法来实现动态的RC滤波,则能很好的克服模拟...

文章目录运动规划、路径规划和轨迹规划路径规划算法随机采样的算法梯度下降法轨迹规划算法基本思路开源算法介绍总结参考资料: 运动规划、路径规划和轨迹规划 机器人的运动规划可以看做是包括了路径规划和轨迹规划两...
minimum snap轨迹规划 本文代码以及其他概念可参考 https://blog.csdn.net/q597967420/article/details/76099491 本文仅对该博文程序部分做进一步解释 minimum snap是在 定义路径点、阶次 轨迹一般用n阶多项式...
%%%二维坐标系变换及绘图T=SE2(0,0,30);%建立变换 x=0 y=0 theta=30°trplot2(T, 'frame', '1', 'color', 'b','axis',[-3 3 -3 3]);%绘图,% 名字:{1} 颜色:蓝色 坐标轴范围[-5 5 -5 5]hold on;...
在 Matlab 中画折线图非常简单,你只需要使用 plot 函数即可。 示例代码如下: x =0:0.1:2*pi; % 定义 x 轴的取值范围 y = sin(x); % 计算 y 轴的取值 plot(x, y) % 绘制折线图 如果你想添加误差条,可以使用 ...
标签: 自动驾驶

标签: T型速度规划
%% 梯形速度曲线 %% 假定初始速度和最终速度为零,给定最大的加速度、运行时间、开始角度 、结束角度 function trapezoid() %给定初始条件 t0=0; tf=10; q0=0; qf=20; a_max=1; if a_max>= 4*(qf-q0)/(tf...
来源 | 阿泽的学习笔记(ID: aze_learning) Convolutional Neural Network CNN 在图像识别等任务中具有重要作用,主要是因为 CNN 利用了图片在其域中的平移不变性。由于图结构不存在平移不变性,所以 CNN ...
自动驾驶中在感知、决策、控制架构中,充满了各种参数的不确定性,例如mobileye识别的车道线confidence,决策中行人轨迹预测,控制中推算本车位置...总之在自动驾驶中,唯一确定的就是不确定本身了。既然如此,有...
S型加减速位置控制详细算法和应用场景介绍,请查看下面文章博客。本篇文章不再赘述,这里主要介绍点动动和...S速度曲线轨迹规划(普通变频位置闭环控制算法详细介绍+SCL代码)_s曲线轨迹规划_RXXW_Dor的博客-程序员宅基地。