梯形速度曲线轨迹 双S形速度曲线轨迹 多个自由度轨迹的时间同步 在线轨迹规划 多项式在线轨迹规划 梯形在线轨迹规划 双S形在线轨迹规划 非线性实时轨迹滤波 多点轨迹(Multi-point) 三次样条曲线(cubic ...
”梯形速度规划“ 的搜索结果
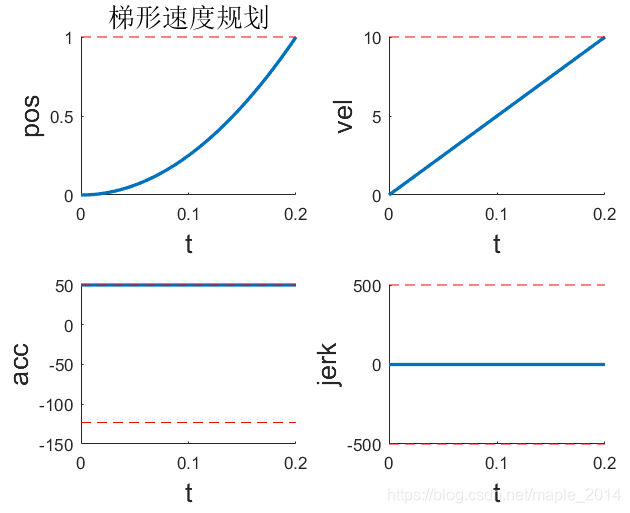
在伺服系统以及作动机构的加减速动作中,为了让速度更加平滑,可以引入梯形速度曲线规划(T-curve velocity profile),梯形曲线是一种时间最优的曲线,在工业界被广泛采用。本文将对GCKontrol中的梯形速度曲线规划...
梯形加减速的速度规划,可以根据起始点位置、速度,终点位置、速度,按照设定的速度和加减速度进行速度规划。

机器人速度规划
标签: 机器人 速度规划 算法
机器人速度规划算法,包括7种速度规划算法:梯形、余弦、多项式、7段s型,7段修正s型,15段s型,31段s型速度规划。所有核心算法均用c语言实现,不调用第三方算法库。
关节空间 VS 操作空间 关节空间与操作空间轨迹规划流程图如下(上标$i$和$f$分别代表起始位置...可以根据机器人或驱动器手册直接确定最大速度或力矩 其缺点是对应操作空间的轨迹无法预测,增加了机械臂与...
梯形速度规划算法原理及代码
标签: 速度规划
梯形速度规划算法的原理与代码。
梯形速度规划是最快也是最简单的速度规划方法。由于其速度连续但不平滑,加速度可控但会跳变,加加速度不可控,通常会引起受控对象震动,控制效果较差。S形速度规划由于其速度连续且平滑,加速度可控且连续,加...

下面介绍的时一种较为常用的梯形速度规划,梯形速度规划因为存在理论的匀速段而且曲线较为简单受控,往往使用起来较为方便。但该速度规划的加速度没有连续,相对于S型速度规划来说冲击力较大,因此在高精度、少冲击...
以下是一个简单的梯形速度规划代码示例: ```c #include #include #define MAX_SPEED 100. // 最大速度 #define ACCELERATION 10. // 加速度 #define DECELERATION 10. // 减速度 int main() { double ...
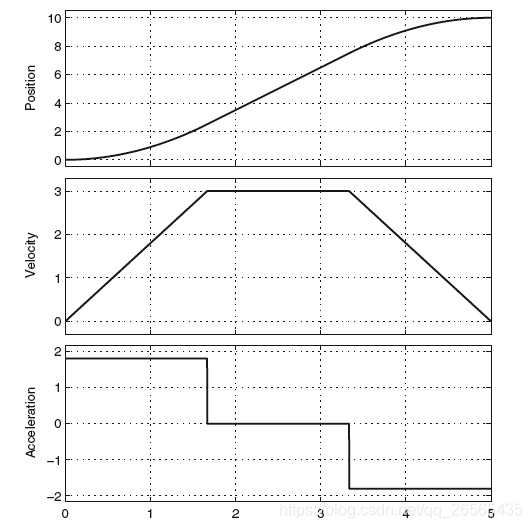
梯形速度分布的轨迹规划,从本质上来说,是一个分段函数的轨迹规划,基本的方式是一个先加速,再匀速,再减速的三段函数的过程。当然,当间隔时间太短时,会出现分段函数只有加速和减速,无匀速的情况。或者因为开始...
给定始末位置和时间信息,规划出轨迹的位置、速度和加速度 端口 输入端 1. Time 沿轨迹的时间点,指定为标量或向量。通常,当指定为标量时,该值将与仿真时间同步,并用于指定采样轨迹的时间点。该块在该时刻输出...

因为机器人运动涉及位置和姿态两个量 , 所以在速度规划和前 瞻控制中还需要考虑二者的 同步 ,即在同一规划时间内机器人末端要满 足轨迹的位置 和姿态的联动 , 这 就对控制算法提供了更高的要求 。关节型多轴...
S形速度曲线轨迹规划算法和应用详细介绍,请查看下面文章博客,这里不再赘述:S速度曲线轨迹规划(普通变频位置闭环控制算法详细介绍+SCL代码)_RXXW_Dor的博客-程序员宅基地。
固定点数表示:将浮点速度数据乘以一个固定的缩放因子,然后将结果向下取整或四舍五入为整数。例如,可以将速度乘以一个适当的倍数,如1000,然后将结果转换为整数。这种方法牺牲了一定的精度,但可以在FPGA中实现...


梯形速度曲线轨迹规划与控制算法
标签: 控制算法
梯形速度曲线轨迹规划与控制算法是一种常用于运动控制系统中的路径规划方法,它可以实现平滑的加速和减速过程,确保系统在运动过程中具有良好的动态性能和稳定性。本文将详细介绍梯形速度曲线轨迹规划与控制算法的...
步进电机梯形加减速实现
标签: 步进电机
步进电机梯形加减速实现,有效的控制步进电机的加速与减速,能够达到平稳过度到设定速度,并保证不失步不过冲
路径规划实施路径规划(使用梯形规划)并使用恒定的加加速度执行,这样会更平滑。 以javascript和html实现,因此任何人都可以在其他地方学习和实现它。 该文件包含一些功能,用于添加系统路径并启动运动循环。 # ...

加速度梯形算法:滤波方式下的速度规划
标签: 算法
加速度梯形算法(滤波方式下的速度规划) 已知线段长度sss,起点速度v0v_0v0,利用加速度梯形算法(滤波方式)计算能达到的最大终点速度和最小终点速度。其中,系统最大速度为vmv_mvm,系统最大加速度为ama_mam...
用qt编写的笛卡尔空间圆弧轨迹插值算法,将插值结果保存到文件中,利用matlab画出圆弧轨迹,及速度加速曲线。其中速度规划采用梯形速度规划。插值算法代码用qt打开,轨迹结果用matlab打开画出轨迹查看。
在介绍本专栏之前,大家可以参考另一篇博图PLC的梯形加减速点动功能块介绍文章梯形加减速点动功能块(博途SCL)_RXXW_Dor的博客-程序员宅基地文章浏览阅读184次。
%参数设定 最大速度 最大加速度 行走距离 插补周期 vmax = 500 ; amax = 50 ; s = 20000 ; Ts = 0.04; %% 判断是否有匀速段 S1 = 0.5*vmax^2/amax ; S2 = s -2*S1; if S2<=0 lab = 2 ; %切换不同的方程 else ...
梯形速度是运动控制系统使用的最简单的一种速度规划方式,其速度曲线如下图所示: v0为初速度,vn为匀速运行速度,vt为末速度,加速和减速阶段加速度为a,总路程为S。 则加速阶段走过的路程S1=(vn*vn-v0*v0)/2a,...
推荐文章
- Unity3D 导入资源_unity怎么导入压缩包-程序员宅基地
- jqgrid 服务器端验证,javascript – jqgrid服务器端错误消息/验证处理-程序员宅基地
- 白山头讲PV: 用calibre进行layout之间的比对-程序员宅基地
- java exit方法_Java:如何测试调用System.exit()的方法?-程序员宅基地
- 如何在金山云上部署高可用Oracle数据库服务_rman target sys/holyp#ssw0rd2024@gdcamspri auxilia-程序员宅基地
- Spring整合Activemq-程序员宅基地
- 语义分割入门的总结-程序员宅基地
- SpringBoot实践(三十五):JVM信息分析_怎样查看springboot项目的jvm状态-程序员宅基地
- 基于springboot+vue的戒毒所人员管理系统 毕业设计-附源码251514_戒毒所管理系统-程序员宅基地
- 【LeetCode】面试题57 - II. 和为s的连续正数序列_leet code 和为s的正数序列 java-程序员宅基地