”蓝桥ROS“ 的搜索结果
以上是蓝桥云课ROS机器人旧版实验报告-06工业机械臂-使用Moveit!的核心要点总结,具体内容根据具体的实验环境和要求可能会有所不同。的可能功能说明,具体功能和使用方法根据具体的实验环境和要求可能会有所不同。...
答:FANUC是一家机器人制造商,他们可以使用ROS驱动来控制他们的机器人。FANUC可以使用ROS来控制他们的机器人,这样就可以使用ROS提供的各种功能来编写机器人应用程序。总之,ROS2是一个更加先进和强大的机器人操作...
qwq
以上是蓝桥云课ROS机器人旧版实验报告-05导航功能核心要点的总结,掌握这些内容可以帮助学生在ROS中实现机器人的导航功能,包括地图构建、导航策略和机器人定位等。以上是蓝桥云课ROS机器人实验报告-05导航功能大纲...

之前,提供如下方式解决更新问题:ROS域名解析问题记录(蓝桥云课ros.asc)口碑很赞的fishros一键安装是否可以呢?试一试看:先调整一下分辨率,如下: fishros:试试看: 出错啦!加权限:chmod 777 fishros然后再...
☞ 蓝桥ROS之f1tenth案例学习与调试(成功) 遥控肯定不过瘾,那么如何用一个PID程序使小车自动沿墙跑呢??? 公式如上…… 跑一跑看看? 阅读pdf文档: python程序模板: #!/usr...
蓝桥杯官网题库答案-C/C++/Java三种代码,包括VIP试题
ROS1基本安装操作和环境配置。 环境: www.lanqiao.cn/courses/854 记录: 1. 熟悉终端: 双击打开,并使用。 当输入正确指令,会有相应反馈结果;不正确指令,会报错。 例如:time,date shiyanlou:~/ $...
蓝桥ROS机器人之turtlesim贪吃蛇 使用功能包为: 后续会补充stdr案例(ROS小课堂出品)。 ~ www.corvin.cn/561.html ~ 使用plotjuggler 专业出图工具,路径一目了然。 移动到红色位置! 再回到中心...

蓝桥ROS机器人初级版云实践平台已经推出5年多了。 www.lanqiao.cn/courses/854评分>9,我觉得不足之处主要是没时间维护。案例也没怎么更新。 虽然课程上都讲过,但是并没有更新到课程当中。 现在简单扩展一下...

以蓝桥ROS课程为例: 目前,数据如下:这类课程有没有市场前景呢?这是第一个疑问。一方面,可以看到大量内容相似或重复的教程;另一面,极其混乱的教程导致了如下一些现象: 看得一头雾水的朋友还是非常多的。...
虽然是一键配置,但还是需要若干步骤的。前轮转向移动机器人的实验结果通常包括机器人的运动轨迹、速度、转向角度等方面的数据。在实验中,我们可以通过设置不同的运动轨迹和控制参数来观察机器人的运动状态。...
蓝桥ROS机器人之C++基础开发第一个程序 语句是一种使程序执行某些操作的指令。语句通常以分号结束。 函数是按顺序执行的语句的集合。每个 C++ 程序都必须包含一个名为main的特殊函数。当运行程序时,执行从main...
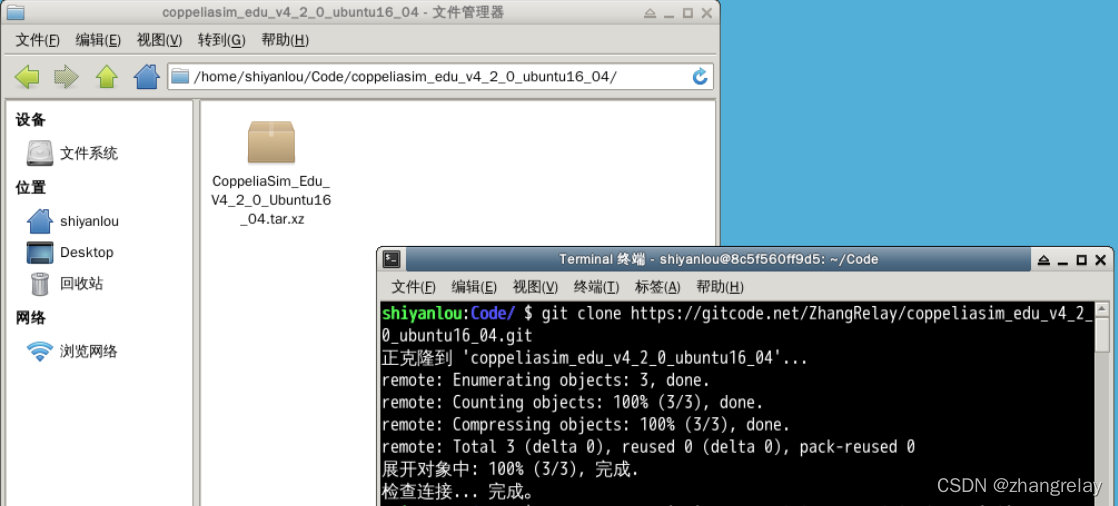
在版本3以及之前,一款好用的仿真工具叫做V-Rep; 在版本4以及之后,这款好用的仿真工具改名为CoppeliaSim。 zhangrelay / CoppeliaSim_Edu_V4_2_0_Ubuntu16_04 · GitCode ... ...tar -xf coppeliasim_edu_v4_2_..
函数是旨在完成特定工作的可重用语句序列。自己编写的函数称为用户定义函数。 函数调用是告诉 CPU 执行函数的表达式。发起函数调用的函数是调用者,被调用的函数是被调用者或被调用函数。进行函数调用时不要忘记...
☞ 蓝桥ROS机器人系统更新和功能包安装记录 为了确保安装速度,请使用国内源: sudo sh -c '. /etc/lsb-release && echo "deb ...

关于ROS机器人课程维护,由于时间关系都还是基础类课程。 并且课程设置目标中性,只是提供一个云端环境供学生实验和学习用,不做过多引导。 ROS工作要求: 负责视觉/激光/毫米波雷达感知相关的数据清理,神经...
为啥不是全自动?全自动是作业,半自动是提示。 ...第三步:贪吃龟(蓝桥ROS机器人之turtlesim贪吃蛇) import rospy from tanksim.msg import Pose from tanksim.srv import Spawn from tank...
直接在蓝桥云课下载就可以学习和使用啦。 文档部分: 源码等: 将源码复制到demo_ws/src下,并编译后使用: catkin build ros1 kinetic(1) or ros2 ardent(2)? 1 shiyanlou:Code/ $ git clone ...

蓝桥ROS机器人之turtlesim贪吃蛇 这里案例只是为了说明,算法不分系统,全平台支持的! 愿意花时间所有linux案例都能移植到win10/11,主要是时间太紧张了……无奈,有时候也没必要移植。 课程中截图如下: ...

蓝桥ROS共有14.04/16.04/18.04三个版本。以16.04为例:默认版本如下:shiyanlou:~/ $ cmake --version [22:47:26] cmake version 3.5.1CMake suite maintained and supported by Kitware (kitware.com/cmake). ...
只有运行结果和之前的提示: 从turtlesim到贪吃蛇……(补充) 解压缩: 创建工作区并编译后执行: roslaunch tank_snake_game start.launch import rospy from tanksim.msg import Pose ...from g...

有个问题记录一下: ROS程序和普通程序有什么区别? 什么是ROS应用?...蓝桥ROS机器人之古月居ROS入门21讲 推荐学生阅读(2019年左右一篇文章): 互联网下半场:从超级入口到超级接口,从超级APP到超级AP..
ROS-Industrial 发行版包含六个主流工业供应商的元包,更多信息可以在支持的硬件页面上找到。 ABB Fanuc Kuka Motoman Robotiq Universal Robots wiki.ros.org/Industrial 以ABB为例: 2016 ☞ ROS连接ABB...

helloros cmake_minimum_required(VERSION 2.8.3) project(helloros) ## Compile as C++11, supported in ROS Kinetic and newer # add_compile_options(-std=c++11) ## Find catkin macros and libraries #...

在蓝桥ros中曾经开发了5个版本的ROS学习教程(均在2019年之前完成)。但是大部分内容并没有公开,测试多轮反馈也不好,这里供需要的朋友参考吧。 ubuntu 14.04 ubuntu 16.04 ubuntu 18.04 在原实验楼,现在蓝桥,...

蓝桥ROS机器人之极简贪吃蛇 有了GitHub,结合蓝桥云课,几乎无敌! 参考:github.com/rapiz1/DungeonRush 下载代码: git clone https://github.com/rapiz1/DungeonRush.git # apt install libsdl2-dev...

ROS域名解析问题记录(蓝桥云课ros.asc) f1tenth案例学习与调试ros1版本pc端 在蓝桥云课ROS中测试一下是否可行(kinetic/melodic/noetic): 需要依据云端具体ROS版本进行配置。 下载f1tenth仿真...

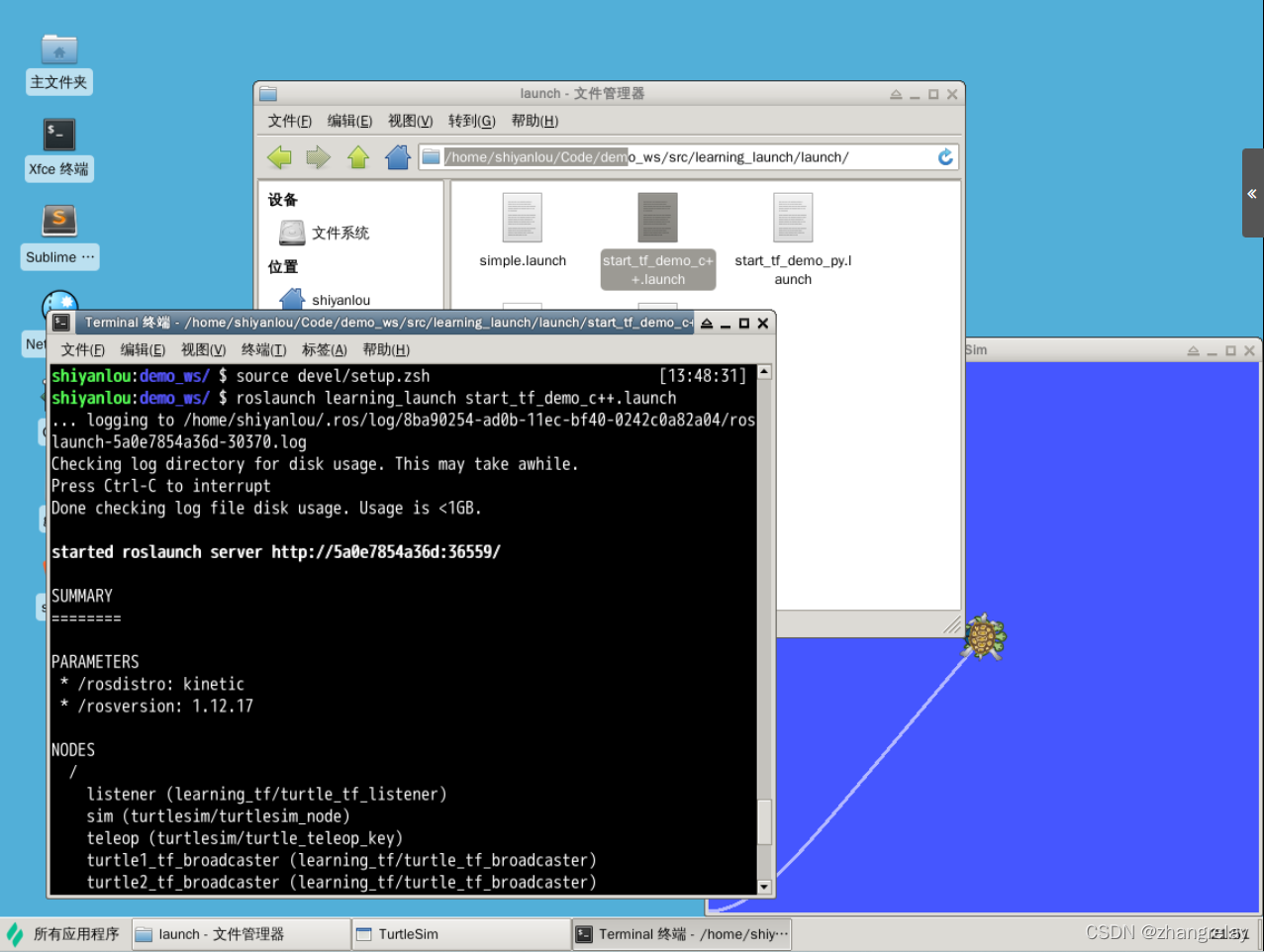
需要先完成实验1+2+3+4,不要直接看本实验。 要求: 创建变换、发布传感器消息、里程数据信息、创建基础控制器、...gitcode.net/ZhangRelay/ros_book 先介绍一下navigation导航demo中案例: 自主学习即可。 turt

蓝桥ROS机器人之现代C++学习笔记支持C++17(未完成)_zhangrelay的博客-程序员宅基地 更换云实践环境的方式最为简洁: ubuntu 18.04www.lanqiao.cn/courses/1635 需要邀请码:SEGK0WPE 之前,在如下: 蓝桥ROS机器人...