”速度规划“ 的搜索结果

机器人速度规划
标签: 机器人 速度规划 算法
机器人速度规划算法,包括7种速度规划算法:梯形、余弦、多项式、7段s型,7段修正s型,15段s型,31段s型速度规划。所有核心算法均用c语言实现,不调用第三方算法库。


4.速度规划算法解析及实现
标签: 算法

嵌入式数控插补系统速度规划研究及软件架构设计_余炼.caj
自己写的一个简单的T型速度规划m文件。需要给定最大的加速度、运行时间、开始角度 、结束角度。
基于运动控制器的PVT运动控制设置,用于单轴运动控制
分段式S形速度规划算法
标签: 加速度 算法
2 分段式S形曲线速度规划 已知初速度V0,末速度Ve,最大速度Vmax,路程距离s,最大加速度amax,最大jerk(加加速度)jmax,要规划位置、速度、加速度、加加速度随时间变化的曲线。具体步骤如下: 1) 假设能够达到最大...
梯形加减速的速度规划,可以根据起始点位置、速度,终点位置、速度,按照设定的速度和加减速度进行速度规划。

不使用bezier库;改进Bizuer,避免在重复输出控制点; 同时将等间隔的Bizuer曲线改进为等间距的Bizuer曲线,避免因为距离过短导致点过于密集;增加速度规划的功能
本文介绍了决策规划框架,解耦和耦合策略



车速控制, 规划车速变化轨迹, 通过反馈控制算法调整车速
本文为第三章,主要讲解 Apollo决策规划算法中的速度规划算法,EM planner的速度规划算法同样是是通过动态规划和二次规划实现的,下面来细讲速度规划算法。以上就是今天要讲的内容,本文介绍了Apollo决策规划算法中...
主要世界绍集中运动控制的方法,以及各自的厂家,配了相应的图片
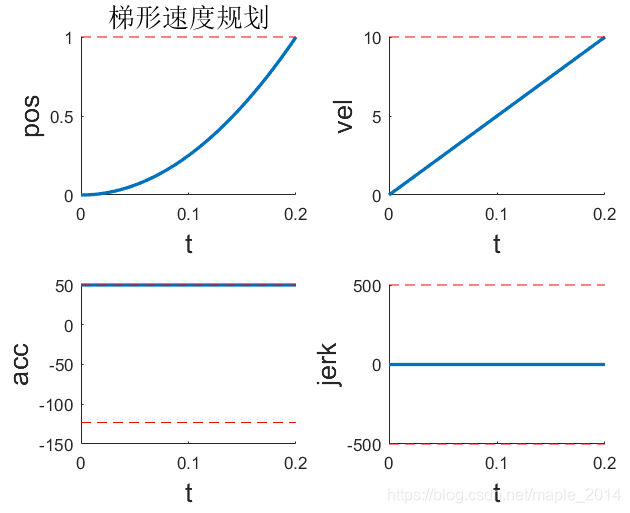
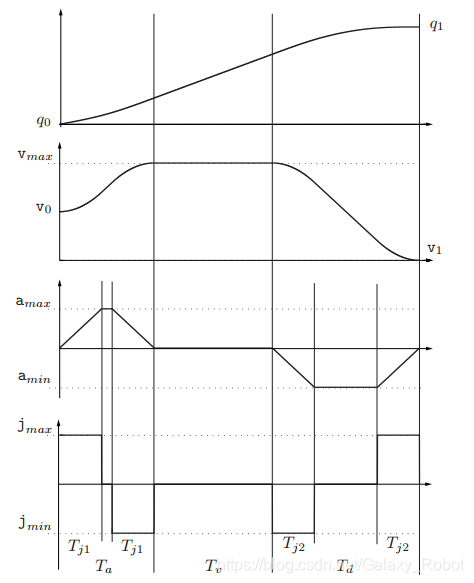
梯形速度规划是最快也是最简单的速度规划方法。由于其速度连续但不平滑,加速度可控但会跳变,加加速度不可控,通常会引起受控对象震动,控制效果较差。S形速度规划由于其速度连续且平滑,加速度可控且连续,加...
一种流形学习算法(很好用),有小波分析的盲信号处理,计算加权加速度,构成不同频率的调制信号,利用matlab GUI实现的串口编程例子,是路径规划的实用方法。


针对一类严格反馈形式的非线性二阶多输入多输出系统,提出一种带有加速度规划的输出跟踪动态控制策略.引入一个代替时间变量的路径参数用以规划路径跟踪时的加速度,回避了设计内环加速度控制回路的常规方法,简化了...

7段S型曲线速度规划matlab实现,采用连续的,线性的加速度曲线,速度曲线抛物线过渡的线段组成。给定起始角度,最大速度、最大加速度、最大加加速度等参数,实现位置曲线,速度曲线,加速度曲线、加加速度曲线的规划...

单轴任意速度规划PVT_单轴_PVT规划_pvt_pvt速度规划_Singlemotion_源码.zip
推荐文章
- Android 编译so文件 MP4V2_android下编译mp4v2-程序员宅基地
- 通讯录Contact_02_contact文件内容-程序员宅基地
- Qt笔记(四十二)之QZXing的编译 配置 使用_qzxingfilterrunnable error:-程序员宅基地
- 关于画图软件Dia打开程序始终为英文界面的问题-程序员宅基地
- OpenCV从入门到精通实战(二)——文档OCR识别(tesseract)-程序员宅基地
- 详解avcodec_receive_packet 11_avcodec_receive_packet eagain-程序员宅基地
- OpenGL SuperBible 7th源码编译记录_superbible7-media github-程序员宅基地
- Wireshark简单使用-程序员宅基地
- MXNet 粗糙的使用指南_iou loss mxnet-程序员宅基地
- iOS对ipa包进行代码混淆《二》 ---代码混淆_ipa包混淆-程序员宅基地