预积分总体的理论与实践思路介绍
”预积分“ 的搜索结果
当使用到IMU时,预积分就是绕不开的一个话题。IMU,中文名叫惯性测量单元,英文名:Inertial measurement unit。它可以测量两个东西,加速度aaa是沿三个轴ax、ay、az方向的线加速度,而角速度w就是这三个方向的...
本文作者为北航自动化学院在读博士邱笑晨,预积分详细公式推导。IMU 预积分技术最早由 T Lupton 于 12 年提出[1], C Forster 于 15 年[2][3][4]将其进一 步拓展到李代数上,形成了一套优雅的理论体系。 Forster 将 ...
为什么要预积分了,slam系统中为了减小优化求解器的负担,采用了关键帧策略,IMU的速率显然要快于关键帧的插入,它们之间的关系可以用论文中的这张图很好的表示。 紧耦合的方式就是把imu和图像的信息共同来估计状态...
对Foster 的paper中的公式进行了详尽的推导,试图将这套优雅的理论详细地展现在读者面前,使读者对IMU 预积分理论有更加完备的认识
泡泡机器人北航博士邱笑晨IMU积分公式总结和推导,很全面也很详细的知道,学习learnVIorb 代码以及VINS必备的基础知识总结, 公式推导的很详细,涉及到代码中的很多指导过程
基于优化的IMU预积分与视觉信息融合
lio_sam预积分学习参考博客.md
预积分体绘制
标签: 体绘制 C++ 预积分
一个德国人写的基于预积分加速的体绘制程序,没有用到GPU加速,但是效率也是相当可以了。工程需要用CMake,里面有数据,亲测可以运行,绝对是研究体绘制基本算法的极品资源。
VINS 中的IMU预积分推导和代码解读,内含自动驾驶完整学习资料


数学建模-数据挖掘可视化-三维数据场体绘制中的预积分分类技术
对ORB-SLAM3代码中的IMU预积分模块进行梳理
本篇文章详细讲解了vins-mono中imu预积分内容,包括复杂的公式推导。
[SLAM] IMU预积分推导
标签: 自动驾驶
本文内容主要来自于对邱笑晨博士IMU.pdf和高博对预积分讲解视频的个人理解。

LIO-SAM是一个多传感器融合的紧耦合SLAM框架,融合的传感器类型有雷达、IMU和GPS,其中雷达和IMU在LIO-SAM框架中必须使用的。LIO-SAM的优化策略采用了GTSAM库,GTSAM库采用了因子图的优化方法,其提供了一些列C++的...
VINS-Mono笔记03_预积分预积分理论为什么需要预积分连续时间下的预积分离散时间下的预积分预积分量的协方差预积分代码实现预积分类`IntegrationBase`预积分类的成员函数构造函数`IntegrationBase::IntegrationBase()...
学习LIO-SAM时自己的一些理解


IMU预积分【SLAM】
标签: 算法
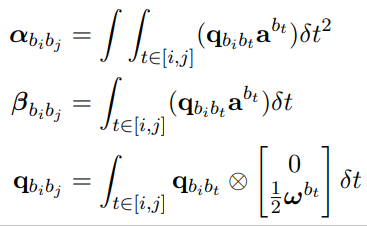
预积分的推导过程比较多,所以这里只记录关键结论。 其实这些公式不太好记忆,因为预积分推导过程的想法来源很巧妙,无法看出物理意义。一切推导的来源: 最好记忆的旋转相对运动量: △Rij≐RiTRj=∏k=ij−1Exp((ω...
gtsam关于imu预积分实现探究 个人学习记录 资料 gtsam官网关于IMU预积分的资料介绍了gtsam预积分基于以下论文实现 Todd Lupton and Salah Sukkarieh, “Visual-Inertial-Aided Navigation for High-Dynamic Motion...

VINS中IMU预积分推导
标签: 算法


推荐文章
- 用好ASP.NET 2.0的URL映射-程序员宅基地
- C语言等级考试是把题目删了,历年全国计算机的等级考试二级C语言上机考试地训练题目库及答案详解(72页)-原创力文档...-程序员宅基地
- Microsoft Office显示正在更新无法打开的问题_正在更新microsoft 365和office-程序员宅基地
- 非常好的Ansible入门教程(超简单)-程序员宅基地
- 【Gradle-8】Gradle插件开发指南-程序员宅基地
- 使用PL/SQL Developer软件解锁_plsqldev表格锁怎么打开-程序员宅基地
- 【Windows Server 2019】Web服务 IIS 配置与管理——配置 IIS 进阶版 Ⅳ_iis默认路径-程序员宅基地
- 网络中的各层协议_发送消息时各层协议-程序员宅基地
- UCRT: VC 2015 Universal CRT, by Microsoft_vc15rt-程序员宅基地
- 关于EntityFramework 7 开发学习_entiry framework 7 书籍-程序员宅基地